ЪжЛњгУЛЇПЩ
БЃДцЩЯЗНЖўЮЌТыЕНЪжЛњжаЃЌдк
ЮЂаХЩЈвЛЩЈжагвЩЯНЧбЁдёЁАДг
ЯрВсбЁШЁЖўЮЌТыЁБМДПЩЁЃ
1ЁЂЬюПеЬт ФПЧАГЃгУЕФДЋЖЏМўЕФЖЈЮЛЗНЗЈгаЃКЕчЦјПЊЙиЃЈЃЉПщЖЈЮЛКЭЃЈЃЉЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт

2ЁЂЕЅЯюбЁдёЬт ШеБОШеСЂЙЋЫОбажЦЕФОбщбЇЯАЛњЦїШЫзАХфЯЕЭГВЩгУДЅОѕДЋИаЦїРДгааЇЕиЗДгГзАХфЧщПіЁЃЦфДЅОѕДЋИаЦїЪєгкЯТСаЃЈЃЉДЋИаЦїЁЃ
AЃЎНгДЅОѕ
BЃЎНгНќОѕCЃЎСІ/СІОиОѕ
DЃЎбЙОѕ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
3ЁЂХаЖЯЬт ЛњЦїШЫЕФжЧФмКЭШЫРрЕФжЧФмвЛбљЕФЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
4ЁЂЕЅЯюбЁдёЬт еГИНМСгыБЛеГИНЬхМфЯрШмадЃЈЃЉЃЌеГИННчУцЕФЧПЖШЃЈЃЉЁЃ
A.дНВюЃЛдНРЮЙЬ
B.дНКУЃЛдНВю
C.дНКУЃЛдНРЮЙЬ
D.дНКУЃЛВЛБф
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
5ЁЂХаЖЯЬт ЙХЯЃРАбЇепЯЃТоЙигкЮхжжМђЕЅЛњаЕИмИЫЁЂаБУцЃЈМтХќЃЉЁЂЛЌТжЁЂТжгыжсЁЂТна§ЕФРэТлЃЌжСНёШдгавтвхЁЃ"ѕЮѕЮАх"ЁЂ"ЛЌЬн"ЪЧЪєгквдЩЯИмИЫЁЂТжгыжсЛњаЕЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
6ЁЂЕЅЯюбЁдёЬт ЪЙгУКИЧЙЪОНЬЧАЃЌМьВщКИЧЙЕФОљбЙзАжУЪЧЗёСМКУЃЌЖЏзїЪЧЗёе§ГЃЃЌЭЌЪБЖдЕчМЋЭЗЕФвЊЧѓЪЧЃЈЃЉЁЃ
AЃЎИќЛЛаТЕФЕчМЋЭЗ
BЃЎЪЙгУФЅКФСПДѓЕФЕчМЋЭЗ
CЃЎаТЕФЛђОЩЕФЖМаа
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
7ЁЂУћДЪНтЪЭ ШсадЪж
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
8ЁЂЮЪД№Ьт БлВПЩшМЦЕФЛљБОвЊЧѓгаФФаЉЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
9ЁЂХаЖЯЬт ЛњЦїШЫЪЙгУЕФЧ§ЖЏзАжУжївЊЪЧЕчСІЧ§ЖЏзАжУЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
10ЁЂУћДЪНтЪЭ BPЭјТч
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
11ЁЂЮЪД№Ьт ЗТШЫЛњЦїШЫЕФЙиМќММЪѕгаФФаЉЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
12ЁЂЬюПеЬт ЛњЦїШЫЕФШ§жжЖЏзїФЃЪНЗжЮЊЃКЃЈЃЉЁЂЃЈЃЉЁЂЃЈЃЉЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
13ЁЂЖрЯюбЁдёЬт
ЛњЦїЪгОѕЯЕЭГжївЊгЩШ§ВПЗжзщГЩЃЈЃЉЁЃ
AЃЎЭМЯёЕФЛёШЁ
BЃЎЭМЯёЛжИД
CЃЎЭМЯёдіЧП
DЃЎЭМЯёЕФДІРэКЭЗжЮі
EЃЎЪфГіЛђЯдЪО
FЃЎЭМаЮЛцжЦ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
14ЁЂЬюПеЬт БеЛЗПижЦЯЕЭГгаЃЈЃЉКЭЃЈЃЉЃЌШєЗДРЁаХКХгыЯЕЭГИјЖЈжЕаХКХЯрЗДЃЌдђГЦЮЊЃЈЃЉЃЌШєМЋадЯрЭЌЃЌдђГЦЮЊЃЈЃЉЃЌвЛАуБеЛЗПижЦЯЕЭГОљВЩгУИКЗДРЁЃЌгжГЦЃЈЃЉЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
15ЁЂЖрЯюбЁдёЬт ЭъећЕФДЋИаЦїгІАќРЈЯТУцЃЈЃЉШ§ВПЗжЁЃ
AЃЎУєИадЊМў
BЃЎМЦЫуЛњаОЦЌ
CЃЎзЊЛЛдЊМў
DЃЎФЃЪ§зЊЛЛЕчТЗ
EЃЎЛљБОзЊЛЛЕчТЗ
FЃЎЮЂВЈЭЈаХЕчТЗ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
16ЁЂЕЅЯюбЁдёЬт дкМЦЫуЛњФкВПЃЌвдДЋИаЦїаХКХЮЊЛљДЁЃЌВЩгУЃЈЃЉРДБржЦДІРэГЬађЁЃМЦЫуЛњЕФЭЈгУГЬађгябдгаЛуБргябдКЭИпМЖгябдЃЈР§ШчC.гябдЕШЃЉЁЃ
A.Ъ§зж
B.ФЃФт
C.МЦЫуЛњгябд
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
17ЁЂЕЅЯюбЁдёЬт ЛњЦїШЫзїЮЊШЫРрЕФаТаЭЩњВњЙЄОпЃЌОпгаЬиЖЈЕФЙІФмЃЌЖјдкПЦЛУгАЦЌЁЂЪщБОжаПДЕНЕФЛњЦїШЫЮоЫљВЛФмЁЃЃЈЃЉ
A.ДэЮѓ
B.е§ШЗ
C.ЧААыОфе§ШЗЃЌКѓАыОфДэЮѓ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
18ЁЂЬюПеЬт ЃЈЃЉЫќПЩвдеьВтЕНЕЅИіЛђЖрИіАДХЅЃЌбЙСІЛњЃЌКЭБЈИцЛиИјnxtЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
19ЁЂЕЅЯюбЁдёЬт ЙЄвЕЛњЦїШЫЕФЪжзІжївЊгаЧЏзІЪНЁЂДХЮќЪНЁЂЦјЮќЪНШ§жжЁЃЦјЮќЪНППЃЈЃЉАбЮќИНЭЗгыЮяЬхбЙдквЛЦ№ЃЌЪЕЯжЮяЬхЕФзЅШЁЁЃ
A.ЛњаЕЪжжИ
B.ЕчЯпШІВњЩњЕФЕчДХСІ
C.ДѓЦјбЙСІ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
20ЁЂЬюПеЬт ЦѓвЕЪЧвдЃЈЃЉЮЊФПЕФЕФЩчЛсзщжЏЃЌЪЧЃЈЃЉЩњВњепКЭЬсЙЉепЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
21ЁЂХаЖЯЬт 1962ФъУРЙњA.MFЙЋЫОЩњВњГіЁАVERSTRA.NЁБЃЈвтЫМЪЧЭђФмАсдЫЃЉЃЌгыUnimA.tionЙЋЫОЩњВњЕФUnimA.teвЛбљГЩЮЊеце§ЩЬвЕЛЏЕФЙЄвЕЛњЦїШЫЃЌВЂГіПкЕНЪРНчИїЙњЃЌЯЦЦ№СЫШЋЪРНчЖдЛњЦїШЫКЭЛњЦїШЫбаОПЕФШШГБЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
22ЁЂЮЪД№Ьт ЪВУДЪЧЮЛжУдЫЖЏбЇЁЂе§ЯђдЫЖЏбЇКЭФцЯђдЫЖЏбЇЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
23ЁЂХаЖЯЬт ЭМЯёЖўжЕЛЏДІРэБуЪЧНЋЭМЯёжаИааЫШЄЕФВПЗжжУ1ЃЌБГОАВПЗжжУ2ЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
24ЁЂЮЪД№Ьт ФуФмР§ОфМИВПЙигкЛњЦїШЫЕФЕчгАТ№ЃПжСЩйЮхИі
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
25ЁЂЕЅЯюбЁдёЬт ЯТУцФФИіЙњМвБЛГЦЮЊЁАЛњЦїШЫЭѕЙњЁБЃП
A.жаЙњ
B.гЂЙњ
C.ШеБО
D.УРЙњ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
26ЁЂЮЪД№Ьт ЪВУДЪЧЖЈЪБВхВЙКЭЖЈОрВхВЙЃПЗжБ№дкЪВУДГЁКЯЯТгІгУЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
27ЁЂЕЅЯюбЁдёЬт ВтЫйЗЂЕчЛњЕФЪфГіаХКХЮЊЃЈЃЉЁЃ
AЃЎФЃФтСП
BЃЎЪ§зжСП
CЃЎПЊЙиСП
DЃЎТіГхСП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
28ЁЂХаЖЯЬт вдШЫЙЄжЧФмОіЖЈЦфааЖЏЕФЛњЦїШЫЪЧЫбОШРрЛњЦїШЫЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
29ЁЂЬюПеЬт ЮвЙњЕФЛњЦїШЫзЈМвДггІгУЛЗОГГіЗЂЃЌНЋЛњЦїШЫЗжЮЊСНДѓРрЃЌМДЙЄвЕЛњЦїШЫКЭЃЈЃЉ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
30ЁЂЕЅЯюбЁдёЬт діСПЪНЙтжсБрТыЦївЛАугІгУЃЈЃЉЬзЙтЕчдЊМўЃЌДгЖјПЩвдЪЕЯжМЦЪ§ЁЂВтЫйЁЂМјЯђКЭЖЈЮЛЁЃ
AЃЎвЛ
BЃЎЖў
CЃЎШ§
DЃЎЫФ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
31ЁЂЕЅЯюбЁдёЬт ФЃФтЭЈаХЯЕЭГгыЪ§зжЭЈаХЯЕЭГЕФжївЊЧјБ№ЪЧЃЈЃЉЁЃ
A.диВЈЦЕТЪВЛвЛбљ
B.аХЕРДЋЫЭЕФаХКХВЛвЛбљ
C.ЕїжЦЗНЪНВЛвЛбљ
D.БрТыЗНЪНВЛвЛбљ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
32ЁЂЕЅЯюбЁдёЬт ЮвЙњЪзНьЛњЦїШЫзуЧђБШШќЪЧдкФФРяОйааЕФЃЈЃЉЁЃ
AЁЂЙўЖћБѕ
BЁЂЩЯКЃ
CЁЂЙужн
DЁЂББОЉ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
33ЁЂЬюПеЬт ЖцЛњЪЧвЛжжЃЈЃЉЕФЧ§ЖЏЦїЃЌЪЪгУгкЃЈЃЉЕФПижЦЯЕЭГЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
34ЁЂЕЅЯюбЁдёЬт ЪОНЬБрГЬЦїЩЯАВШЋПЊЙиЮеНєЮЊONЃЌЫЩПЊЮЊOFFзДЬЌЃЌзїЮЊНјЖјзЗМгЕФЙІФмЃЌЕБЮеНєСІЙ§ДѓЪБЃЌЮЊЃЈЃЉзДЬЌЁЃ
AЃЎВЛБф
BЃЎON
CЃЎOFF
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
35ЁЂЮЪД№Ьт ЮЊСЫЗРжЙЛњЦїШЫЩЫКІШЫРрЃЌПЦЛУзїМвАЂЮїФЊЗђЃЈIsA.A.C..A.simovЃЉгк1940ФъЬсГіСЫЁАЛњЦїШЫШ§ддђЁБЃЌЧыЮЪЛњЦїШЫШ§ддђЪЧЪВУДЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
36ЁЂЕЅЯюбЁдёЬт ЖдгкзЊЖЏЙиНкЖјбдЃЌЙиНкБфСПЪЧD-HВЮЪ§жаЕФЃЈЃЉЁЃ
AЃЎЙиНкНЧ
BЃЎИЫМўГЄЖШ
CЃЎКсОр
DЃЎХЄзЊНЧ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
37ЁЂЖрЯюбЁдёЬт ПижЦЕуВЛБфЖЏзїЪЧжИжЛИФБфЙЄОпзЫЬЌЖј ВЛИФБфЙЄОпМтЖЫЕуЃЈПижЦЕуЃЉЮЛжУЕФВйзїЃЌЯТУцЃЈЃЉПЩвдЪЕЯжПижЦЕуВЛБфЖЏзїЁЃ
A.ЙиНкзјБъЯЕ
B.жБНЧзјБъЯЕ
C.дВжљзјБъЯЕ
D.ЙЄОпзјБъЯЕ
E.гУЛЇзјБъЯЕ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
38ЁЂЖрЯюбЁдёЬт&nРДдД:91ПМЪдЭј 91ExAm.orgbsp; ЖдMOTOMANЛњЦїШЫНјаажсВйзїЪБЃЌПЩвдЪЙгУЕФзјБъЯЕгаЃЈЃЉЁЃ
AЃЎжБНЧзјБъЯЕ
BЃЎЙиНкзјБъЯЕ
CЃЎдВжљзјБъЯЕ
DЃЎЙЄОпзјБъЯЕ
EЃЎгУЛЇзјБъЯЕ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
39ЁЂХаЖЯЬт ЙиНкiЕФзјБъЯЕЗХдкi-1ЙиНкЕФФЉЖЫЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
40ЁЂХаЖЯЬт жаЙњЕФЛњЦїШЫзЈМвДггІгУЛЗОГГіЗЂЃЌНЋЛњЦїШЫЗжЮЊСНДѓРрЃЌМДЙЄвЕЛњЦїШЫКЭЬижжЛњЦїШЫЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
41ЁЂЖрЯюбЁдёЬт дкMOTOMANЛњЦїШЫЫљЪЙгУЕФINFORMIIIгябджївЊЕФвЦЖЏУќСюжаЃЌМЧТМгавЦЖЏЕНЕФЮЛжУЃЌЃЈЃЉЁЃ
A.ВхВЙЗНЪН
B.дйЯжЫйЖШ
C.PLЖЈЮЛОЋЖШ
D.ЫљЪЙгУTOOLКХ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
42ЁЂХаЖЯЬт жаЙњПЦбЇМвЖдЛњЦїШЫЕФЖЈвхЪЧЃКЁАЛњЦїШЫЪЧвЛжжздЖЏЛЏЕФЛњЦїЃЌЫљВЛЭЌЕФЪЧетжжЛњЦїОпБИвЛаЉгыШЫЛђЩњЮяЯрЫЦЕФжЧФмФмСІЃЌШчИажЊФмСІЁЂЙцЛЎФмСІЁЂЖЏзїФмСІКЭаЭЌФмСІЃЌЪЧвЛжжОпгаИпЖШСщЛюадЕФздЖЏЛЏЛњЦїЁБЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
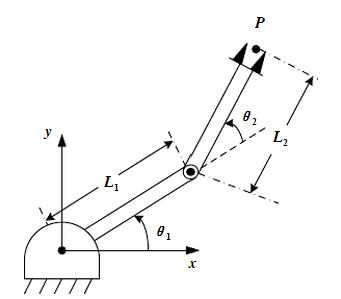
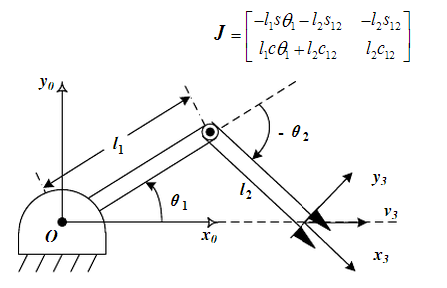
43ЁЂЮЪД№Ьт ШчЭМЫљЪОЮЊЦНУцФкЕФСНа§зЊЙиНкЛњаЕЪжЃЌвбжЊЛњЦїШЫФЉЖЫЕФзјБъжЕ{xЃЌy}ЃЌЪдЧѓЦфЙиНка§зЊБфСПІШ1КЭІШ2.
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
44ЁЂХаЖЯЬт ГЌЩљВЈДЋИаЦїЪЧФмЙЛеьВтЕНвЛИіФПБъКЭДыЪЉЃЌдкЦфСкНќгЂДчЛђРхУзЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
45ЁЂЮЪД№Ьт ЙЄвЕЛњЦїШЫЖдвЦЖЏЕМЙьЕФвЊЧѓЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
46ЁЂХаЖЯЬт ЛњЦїШЫЁЂЮЂЛњПижЦаЭЗьШвЛњЁЂздЖЏЖдНЙЗРВќаЭЩуЯёЛњЁЂзАгаЮЂаЭМЦЫуЛњЕФЕчЪгЛњКЭЕчЗЙьвЕШвђЮЊЦфЙЄзїдРэдкБОжЪЩЯЮодЫЖЏЃЌЫљвдвдЩЯОљВЛЪєгкЛњЕчвЛЬхЛЏЕФВњЦЗЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
47ЁЂЖрЯюбЁдёЬт ЖдЛњЦїШЫНјааЪОНЬЪБЃЌЪОНЬБрГЬЦїЩЯЪжЖЏЫйЖШПЩЗжЮЊЃЈЃЉЁЃ
AЃЎИпЫй
BЃЎЮЂЖЏ
CЃЎЕЭЫй
DЃЎжаЫй
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
48ЁЂХаЖЯЬт ХХБЌЛњЦїШЫВЛНіПЩвдХХГ§еЈЕЏЃЌРћгУЫќЕФеьВьДЋИаЦїЛЙПЩМрЪгЗИзяЗжзгЕФЛюЖЏЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
49ЁЂХаЖЯЬт гЩЕчзшгІБфЦЌзщГЩЕчЧХПЩвдЙЙГЩВтСПжиСПЕФДЋИаЦїЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
50ЁЂЬюПеЬт ЕкШ§ДњОпгажЧФмЕФЛњЦїШЫЪЧППШЫЙЄжЧФмММЪѕОіВпааЖЏЕФЛњЦїШЫЃЌЫќУЧИљОнИаОѕЕНЕФаХЯЂЃЌНјааЃЈЃЉЃЌВЂзїГіХаЖЯКЭОіВпааЖЏЕФЛњЦїШЫЃЌЪЙгУШЫЕФВЮгыОЭПЩвдЭъГЩвЛаЉИДдгЕФЙЄзїЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
51ЁЂЕЅЯюбЁдёЬт ХчЭПЁЂЕиУцФЅЙтЁЂИжЬњМмМгЙЄзїМшПрЃЌЦШЧаашвЊВЩгУЛњЦїШЫРДИФЩЦЙЄШЫЕФЙЄзїЛЗОГЁЃЃЈЃЉПЩНјаажчвЙЪЉЙЄЃЌЫѕЖЬЙЄЦкЃЌБЃжЄЙЄГЬжЪСПЁЃ
A.вНСЦПЕИДЛњЦїШЫ
B.ХЉЁЂСжЁЂЫЎВњМАПѓвЕЛњЦїШЫ
C.НЈЩшаавЕЛњЦїШЫ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
52ЁЂЕЅЯюбЁдёЬт ЮЊСЫШЗБЃАВШЋЃЌгУЪОНЬБрГЬЦїЪжЖЏдЫааЛњЦїШЫЪБЃЌЛњЦїШЫЕФзюИпЫйЖШЯожЦЮЊЃЈЃЉЁЃ
AЃЎ50mm/s
BЃЎ250mm/s
CЃЎ800mm/s
DЃЎ1600mm/s
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
53ЁЂЬюПеЬт дкЙЄвЕЛњЦїШЫЩшМЦжаВЩгУЕФЫФжжГЃгУЕФДЋЖЏЯћЯЖЗНЗЈЗжБ№ЪЧЃКЃЈЃЉЁЂЃЈЃЉЁЂЃЈЃЉЁЂЃЈЃЉЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
54ЁЂЕЅЯюбЁдёЬт ЪРНчЩЯЕквЛЬЈЛњЦїШЫЃеЃюЃщЃэЃсЃєЃхЕЎЩњгкФЧФъЃПЃЈЃЉ
A.1955
B.1987
C.1962
D.1963
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
55ЁЂХаЖЯЬт зюЕфаЭЕФЙХДњЛњаЕгаНлщРЁЂъЄщёЁЂЗГЕЁЂЭВГЕЕШЬсЫЎЛњаЕЃЛСЌЛњэдЁЂЫЎзЊСЌФЅЁЂЫЎзЊДѓЗФГЕЕШЪЧЪєгкЫЎСІЛњаЕЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
56ЁЂЬюПеЬт ЛњЦїШЫДѓШќГЁЕигЩздЖЏЧјКЭЃЈЃЉзщГЩЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
57ЁЂЬюПеЬт ЛњЦїШЫЕФжиИДЖЈЮЛОЋЖШЪЧжИЃЈЃЉжДааЦїЮЊжиИДЕНДяЭЌвЛФПБъЮЛжУЖјЪЕМЪЕНДяЮЛжУжЎМфЕФНгНќГЬЖШЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
58ЁЂЖрЯюбЁдёЬт ЙЄвЕЛњЦїШЫАДПижЦЗНЪНЗжЃЌПЩЗжЮЊЃЈЃЉЁЃ
A.ЕуЮЛПижЦ
B.ТжРЊПижЦ
C.СЌајЙьМЃПижЦ
D.ЮЛжУПижЦ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
59ЁЂЕЅЯюбЁдёЬт гУгкМьВтЮяЬхНгДЅУцжЎМфЯрЖддЫЖЏДѓаЁКЭЗНЯђЕФДЋИаЦїЪЧЃЈЃЉЁЃ
AЃЎНгНќОѕДЋИаЦї
BЃЎНгДЅОѕДЋИаЦї
CЃЎЛЌЖЏОѕДЋИаЦї
DЃЎбЙОѕДЋИаЦї
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
60ЁЂЬюПеЬт ЙЄвЕЛњЦїШЫЪжБлЕФЩшМЦжаГЃгУНсЙЙЮЊЃКЃЈЃЉЁЂЃЈЃЉ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
61ЁЂЖрЯюбЁдёЬт FMSгЩЃЈЃЉЕШгкЯЕЭГзщГЩЁЃ
A.ЮяСїЯЕЭГ
B.аХЯЂСїЯЕЭГ
C.ФмдДСїЯЕЭГ
D.МгЙЄЯЕЭГ
E.ВФСЯЯЕЭГ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
62ЁЂЮЪД№Ьт дкЙЄвЕгІгУжаЃЌЙЄвЕЛњЦїШЫжївЊЗжЮЊФФМИРрЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
63ЁЂУћДЪНтЪЭ MOVC
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
64ЁЂЬюПеЬт ЙЄвЕЛњЦїШЫЕФЮхжжЛљБОзјБъЪНЛњЦїШЫЃЈЃЉЁЂЃЈЃЉЁЂЃЈЃЉЁЂЃЈЃЉЁЂЃЈЃЉЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
65ЁЂЬюПеЬт LegoMinD.stormsЃЈРжИпЛњЦїШЫЃЉЪЧ**СЫПЩБрГЬLegoзЉПщЁЂЕчЖЏТэДяЁЂЃЈЃЉЁЂLegoTeC.hniC.ВПЗжЃЈГнТжЁЂТжжсЁЂКсСКЃЉЕФЭГГЦЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
66ЁЂЬюПеЬт ЛњЦїШЫЕФЧ§ЖЏЗНЪНжївЊгаЃЈЃЉЁЂЃЈЃЉКЭЃЈЃЉШ§жжЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
67ЁЂЬюПеЬт етаЉЮяРэСППЩвдзЊЛЛГЩСНМЋАхМфЕФЕчШнСПЁЂгІБфв§Ц№ЕФЕчзшБфЛЏЁЂДХГЁЧПЖШгыДХГЁЦЕТЪБфЛЏЁЂЙтгыЙтЕФДЋВЅЁЂЩљвєЕФДЋВЅЕШЦфЫќЮяРэСПЃЌзюжезЊЛЛГЩаХКХЃЈЃЉ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
68ЁЂЖрЯюбЁдёЬт ЙЄвЕЛњЦїШЫгЩЃЈЃЉзщГЩ
A.ЫХЗўзАжУ
B.ПижЦзАжУ
C.Ч§ЖЏзАжУ
D.ВйзїЛњ
E.ДЋИаЛњ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
69ЁЂУћДЪНтЪЭ INC
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
70ЁЂУћДЪНтЪЭ ЛњЦїШЫЖЏСІбЇ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
71ЁЂЖрЯюбЁдёЬт ЛњЦїШЫЕФЪОНЬЗНЪНЃЌгаЃЈЃЉжжЗНЪНЁЃ
AЃЎжБНгЪОНЬ
BЃЎМфНгЪОНЬ
CЃЎдЖГЬЪОНЬ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
72ЁЂУћДЪНтЪЭ LABEL
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
73ЁЂЕЅЯюбЁдёЬт ЮЊСЫЛёЕУЗЧГЃЦНЮШЕФМгЙЄЙ§ГЬЃЌЯЃЭћзївЕЦєЖЏЃЈЮЛжУЮЊСуЃЉЪБЃКЃЈЃЉЁЃ
AЃЎЫйЖШЮЊСуЃЌМгЫйЖШЮЊСу
BЃЎЫйЖШЮЊСуЃЌМгЫйЖШКуЖЈ
CЃЎЫйЖШКуЖЈЃЌМгЫйЖШЮЊСу
DЃЎЫйЖШКуЖЈЃЌМгЫйЖШКуЖЈ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
74ЁЂЖрЯюбЁдёЬт ЙЄвЕЛњЦїШЫАВзАдкФЉЖЫжДааЦїЩЯЕФМаГжЦїЗжЮЊЃЈЃЉ
A.ЛњаЕМаНє
B.ДХСІМаНє
C.вКбЙеХНє
D.ЦјЖЏМаНє
E.ецПеГщЮќ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
75ЁЂЕЅЯюбЁдёЬт дЫЖЏбЇжївЊЪЧбаОПЛњЦїШЫЕФЃЈЃЉЁЃ
A.ЖЏСІдДЪЧЪВУД
B.дЫЖЏКЭЪБМфЕФЙиЯЕ
C.ЖЏСІЕФДЋЕнгызЊЛЛ
D.дЫЖЏЕФгІгУ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
76ЁЂЬюПеЬт ЃЈЃЉЪЧЛњЦїШЫЯЕЭГЕФаФдрЃЌЭЈЙ§ЫќЃЌПЩвдАбНгЪмИїжжДЋИаЦїЕФЪфШыЃЌЭЈЙ§ЖдЪфШыЪ§ОнЕФМЦЫуЁЂХаЖЯЕШЪфГіПижЦИїжжЛњЙЙЃЌШУЛњЦїШЫЖЏзїЁЂЗЂЩљЕШЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
77ЁЂЕЅЯюбЁдёЬт жаЙњПЦММДѓбЇдкФФвЛФъзщНЈСЫЙњФкЕквЛжЇRobotCupЗТецзуЧђЖгЁЃЃЈЃЉ
A.1996
B.1991
C.1998
D.2000
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
78ЁЂЬюПеЬт ЫќФкВПгавЛИіЃЈЃЉЃЌВњЩњжмЦкЮЊЃЈЃЉЃЌПэЖШЮЊЃЈЃЉЕФЛљзМаХКХЃЌНЋЛёЕУЕФжБСїЦЋжУЕчбЙгыЃЈЃЉЕФЕчбЙБШНЯЃЌЛёЕУЕчбЙВюЪфГіЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
79ЁЂЕЅЯюбЁдёЬт дЫЖЏФцЮЪЬтЪЧЪЕЯжШчЯТБфЛЛЃЈЃЉЁЃ
AЃЎДгЙиНкПеМфЕНВйзїПеМфЕФБфЛЛ
BЃЎДгВйзїПеМфЕНЕЯПЈЖћПеМфЕФБфЛЛ
CЃЎДгЕЯПЈЖћПеМфЕНЙиНкПеМфЕФБфЛЛ
DЃЎДгВйзїПеМфЕНШЮЮёПеМфЕФБфЛЛ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
80ЁЂЬюПеЬт ЛњЦїШЫЯЕЭГДѓжТгЩЃЈЃЉЁЂЃЈЃЉЁЂЃЈЃЉКЭЃЈЃЉЁЂЃЈЃЉЁЂЃЈЃЉЕШВПЗжзщГЩЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
81ЁЂЬюПеЬт ВННјЕчЛњПЩЗжЮЊЃЈЃЉЃЈМђГЦVRЃЉЁЂЃЈЃЉЃЈМђГЦPMЃЉКЭЃЈЃЉЃЈМђГЦHB.ЃЉЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
82ЁЂЕЅЯюбЁдёЬт ШЫУЧЪЕЯжЖдЛњЦїШЫЕФПижЦВЛАќРЈЪВУДЃПЃЈЃЉ
A.ЪфШы
B.ЪфГі
C.ГЬађ
D.ЗДгІ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
83ЁЂЮЪД№Ьт баОПжЦдьЗТШЫаЮЛњЦїШЫгаКЮвтвхЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
84ЁЂЕЅЯюбЁдёЬт ЭЈГЃЖдЛњЦїШЫНјааЪОНЬБрГЬЪБЃЌвЊЧѓзюГѕГЬађЕугызюжеГЬађЕуЕФЮЛжУЃЈЃЉЃЌПЩЬсИпЙЄзїаЇТЪЁЃ
AЃЎЯрЭЌ
BЃЎВЛЭЌ
CЃЎЮоЫљЮН
DЃЎЗжРыдНДѓдНКУ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
85ЁЂЕЅЯюбЁдёЬт гУжазгКфЛїгЫКЫЪБГіЯждзгКЫЕФСбБфЃЌВЂЗХГіаТЕФЃЈЃЉЯжЯѓЃЌГЦКЫСбБфЗДгІ
A.жЪзг
B.Чсзг
C.жазг
D.дзг
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
86ЁЂЕЅЯюбЁдёЬт ЫцзХЕчСІЕчзгММЪѕЕФЗЂеЙЃЌЧ§ЖЏЕчЛњЕФЕчСІПижЦЕФЬхЛ§дНРДдНаЁЃЌПЩЪЕЯжИпЫйИпОЋЖШПижЦЪЧЃЈЃЉЕФвЛИіживЊЬиЕуЁЃ
A.ЕчЛњ
B.ДЋИаЦї
C.ЛњаЕ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
87ЁЂЕЅЯюбЁдёЬт ЙњМЪЩЯзюОпгАЯьЕФКЭСНДѓЪРНчБЛњЦїШЫзуЧђШќЪЧЪВУДЁЃЃЈЃЉ
A.Fsker
B.RoB.otC.up
C.FIFA.
D.FLL
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
88ЁЂЬюПеЬт ЙЄвЕЛњЦїШЫЯЕЭГгЩШ§ДѓВПЗжзщГЩЃЈЃЉЁЂЃЈЃЉЁЂЃЈЃЉЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
89ЁЂЮЪД№Ьт жЧФмЛњЦїШЫЕФЫљЮНжЧФмЕФБэЯжаЮЪНЪЧЪВУДЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
90ЁЂЮЪД№Ьт ЪдТлЪіТжЪНаазпЛњЙЙКЭзуЪНаазпЛњЙЙЕФЬиЕуКЭИїздЪЪгУЕФГЁКЯЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
91ЁЂЕЅЯюбЁдёЬт гааЉЙЄзїЛЗОГЦјЮЖФбЮХЁЂЛгЗЂадЧПЁЂвзШМвзБЌЃЌЖдШЫЬхгаКмДѓЮЃКІЁЃЃЈЃЉНсЙЙМђЕЅЃЌЮоТлКЮжжЧщПіЯТЖМФмБЃжЄЙЄзїжЪСПЃЌЖјЧвЛњЦїШЫздДјЗРБЌЯЕЭГЃЌПЩБЃжЄЙЄзїАВШЋПЩППЁЃ
A.ХчЭПЛњЦїШЫ
B.КИНгЛњЦїШЫ
C.ЛњЦїМгЙЄЛњЦїШЫ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
92ЁЂХаЖЯЬт жЧФмЛњЦїШЫЪЧвдШЫЙЄжЧФмОіЖЈЦфааЖЏЕФЛњЦїШЫЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
93ЁЂЬюПеЬт ДЋИаЦїЕФжївЊжИБъЪЧЃЈЃЉЃЌЭЌЪБЛЙвЊЧѓдкШЮКЮЛЗОГЯТЖМФмЙЛПЩППЕФЙЄзїЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
94ЁЂХаЖЯЬт ПежаЛњЦїШЫгжНаЮоШЫЛњЦїЃЌНќФъРДдкОќгУЛњЦїШЫМвзхжаЃЌЮоШЫЛњЪЧПЦбаЛюЖЏзюЛюдОЁЂММЪѕНјВНзюДѓЁЂбаОПМАВЩЙКОЗбЭЖШызюЖрЁЂЪЕеНОбщзюЗсИЛЕФСьгђЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
95ЁЂУћДЪНтЪЭ COMMENT
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
96ЁЂЕЅЯюбЁдёЬт вЛИіИеЬхдкПеМфдЫЖЏОпгаЃЈЃЉздгЩЖШЁЃ
AЃЎ3Иі
BЃЎ4Иі
CЃЎ5Иі
DЃЎ6Иі
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
97ЁЂЬюПеЬт ЃЈЃЉФъЃЌУРЙњБіЯІЗЈФсбЧДѓбЇжЦГЩЪРНчЩЯЕквЛЬЈЕчзгМЦЫуЛњENIA.C.вдРДЃЌЕчзгМЦЫуЛњЕФЗЂеЙОРњСЫДгЃЈЃЉЙВЫФИіНзЖЮЃЌМДЭЈГЃЫљЫЕЕФЕквЛДњЁЂЕкЖўДњЁЂЕкШ§ДњКЭЕкЫФДњМЦЫуЛњЁЃЯжЙуЗКЪЙгУЕФЮЂаЭМЦЫуЛњЪЧДѓЙцФЃМЏГЩЕчТЗММЪѕЗЂеЙЕФВњЮяЃЌЫќЪєгкЕкЃЈЃЉДњМЦЫуЛњЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
98ЁЂЮЪД№Ьт ШчЭМЫљЪОЕФШ§здгЩЖШЛњаЕЪжЃЈСНИіа§зЊЙиНкМгвЛИіЦНвЦЙиНкЃЌМђГЦRPRЛњаЕЪжЃЉЃЌЧѓФЉЖЫЛњаЕЪжЕФдЫЖЏбЇЗНГЬЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
99ЁЂЮЪД№Ьт ДгУшЪіВйзїУќСюЕФНЧЖШПДЃЌЛњЦїШЫБрГЬгябдПЩЗжЮЊФФМИРрЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
100ЁЂЮЪД№Ьт ЛњЦїШЫЪгОѕЕФгВМўЯЕЭГгЩФФаЉВПЗжзщГЩЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
101ЁЂЬюПеЬт жаЙњЧрЩйФъЛњЦїШЫОКШќУПЃЈЃЉФъОйАьвЛДЮ.
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
102ЁЂЕЅЯюбЁдёЬт ЛњаЕгЩЪфШыЁЂДЋЖЏЁЂЪфГіЁЂАВзАЙЬЖЈЫФИіВПЗжзщГЩЃЌЖјНгЪмФмСПЁЂЮяжЪЁЂаХЯЂЪЧЃЈЃЉЁЃ
A.ЪфШыВПЗж
B.ЪфГіВПЗж
C.ДЋЖЏВПЗж
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
103ЁЂУћДЪНтЪЭ MOVS
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
104ЁЂЬюПеЬт 1980ФъЙЄвЕЛњЦїШЫдкШеБОЦеМАЃЌЫцКѓЙЄвЕЛњЦїШЫдкШеБОЕУЕНОоДѓЗЂеЙЃЌШеБОвђДЫгЎЕУЃЈЃЉУРГЦЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
105ЁЂЬюПеЬт ЩшЖЈЮЊжБНЧзјБъЯЕЪБЃЌЛњЦїШЫПижЦЕубиXЁЂYЁЂZжсЃЈЃЉвЦЖЏЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
106ЁЂЕЅЯюбЁдёЬт ЯжДњПЦбЇИяУќЪЧгЩЃЈЃЉРПЊађФЛЕФ
A.ХЃЖйСІбЇКЭИчАзФсШеаФЫЕ
B.ЕРЖћЖйдзгТлКЭДяЖћЮФНјЛЏТл
C.СПзгСІбЇКЭАЎвђЫЙЬЙЯрЖдТл
D.ЯЕЭГТлКЭКФЩЂНсЙЙРэТл
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
107ЁЂЕЅЯюбЁдёЬт ЖЏСІбЇЕФбаОПФкШнЪЧНЋЛњЦїШЫЕФЃЈЃЉСЊЯЕЦ№РДЁЃ
AЃЎдЫЖЏгыПижЦ
BЃЎДЋИаЦїгыПижЦ
CЃЎНсЙЙгыдЫЖЏ
DЃЎДЋИаЯЕЭГгыдЫЖЏ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
108ЁЂЬюПеЬт RC.XОпгаЃЈЃЉИіЪфШыЪфГіПкЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
109ЁЂЬюПеЬт ЛњЦїШЫАДЛњЙЙЬиадПЩвдЛЎЗжЮЊЃЈЃЉКЭЃЈЃЉСНДѓРрЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
110ЁЂЕЅЯюбЁдёЬт 74LS245ЕФе§ГЃЙЄзїЕчбЙЪЧЃЈЃЉЁЃ
AЁЂ3V
BЁЂ5V
CЁЂ12V
DЁЂ24V
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
111ЁЂЕЅЯюбЁдёЬт ЙЄвЕЛњЦїШЫЕФЖюЖЈИКдиЪЧжИдкЙцЖЈЗЖЮЇФкЃЈЃЉЫљФмГаЪмЕФзюДѓИКдидЪаэжЕ
AЃЎЪжЭѓЛњаЕНгПкДІ
BЃЎЪжБл
CЃЎФЉЖЫжДааЦї
DЃЎЛњзљ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
112ЁЂЖрЯюбЁдёЬт МЏПиЪНзуЧђЛњЦїШЫЕФжЧФмжївЊБэЯждкЃЈЃЉСНИізгЯЕЭГЁЃ
AЃЎЛњЦїШЫаЁГЕзгЯЕЭГ
BЃЎЛњЦїШЫЭЈаХзгЯЕЭГ
CЃЎЛњЦїШЫЪгОѕзгЯЕЭГ
DЃЎЛњЦїШЫОіВпзгЯЕЭГ
EЃЎЛњЦїШЫзмПизгЯЕЭГ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
113ЁЂХаЖЯЬт ЛњаЕОЭЪЧЪЕЯжФГаЉЙЄзїШЮЮёЕФзАБИЛђЦїОпЃЌвВЪЧЛњЦїКЭЛњЙЙЕФзмГЦЁЂЗКГЦЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
114ЁЂЮЪД№Ьт ЛњЦїШЫгаФФМИИіЛљБОЛњФмЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
115ЁЂЖрЯюбЁдёЬт дкЛњЦїШЫЖЏзїЗЖЮЇФкЪОНЬЪБЃЌашвЊзёЪиЕФЪТЯюгаЃЈЃЉЁЃ
AЃЎБЃГжДге§УцЙлПДЛњЦїШЫ
BЃЎзёЪиВйзїВНжш
CЃЎПМТЧЛњЦїШЫЭЛШЛЯђздМКЫљДІЗНЮЛдЫааЪБЕФгІБфЗНАИ
DЃЎШЗБЃЩшжУЖуБмГЁЫљЃЌвдЗРЭђвЛ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
116ЁЂЕЅЯюбЁдёЬт РћгУЮяжЪБОЩэЕФФГжжПЭЙладжЪжЦзїЕФДЋИаЦїГЦжЎЮЊЃЈЃЉЁЃ
AЃЎЮяадаЭ
BЃЎНсЙЙаЭ
CЃЎвЛДЮвЧБэ
DЃЎЖўДЮвЧБэ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
117ЁЂХаЖЯЬт ЖдгкОпгаЭтСІзїгУЕФЗЧБЃЪиЛњаЕЯЕЭГЃЌЦфРИёРЪШеЖЏСІКЏЪ§LПЩЖЈвхЮЊЯЕЭГзмЖЏФмгыЯЕЭГзмЪЦФмжЎКЭЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
118ЁЂЕЅЯюбЁдёЬт гЩЪ§ПиЛњДВКЭЦфЫќздЖЏЛЏЙЄвеЩшБИзщГЩЕФЃЈЃЉЃЌПЩвдАДееШЮвтЫГађМгЙЄвЛзщВЛЭЌЙЄађгыВЛЭЌНкХФЕФЙЄМўЃЌВЂФмЪЪЪБЕиздгЩЕїЖШКЭЙмРэЁЃ
AЃЎИеаджЦдьЯЕЭГ
BЃЎШсаджЦдьЯЕЭГ
CЃЎЕЏаджЦдьЯЕЭГ
DЃЎФгаджЦдьЯЕЭГ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
119ЁЂХаЖЯЬт ИљОнзївЕШЮЮёвЊЧѓЕФВЛЭЌЃЌЛњЦїШЫЕФПижЦЗНЪНгжПЩЗжЮЊЕуЮЛПижЦЁЂСЌајЙьМЃПижЦКЭСІЃЈСІОиЃЉПижЦЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
120ЁЂЮЪД№Ьт АДЧ§ЖЏаЮЪНЛЎЗжЙЄвЕЛњЦїШЫЗжЮЊФФМИРрЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
121ЁЂЬюПеЬт ЛњЦїШЫЯЕЭГЕФНсЙЙгЩЛњЦїШЫЕФЛњЙЙВПЗжЁЂДЋИаЦїзщЁЂПижЦВПЗжМАаХЯЂДІРэВПЗжзщГЩЁЃИажЊЛњЦїШЫздЩэЛђЭтВПЛЗОГБфЛЏЪЧвРППЃЈЃЉЭъГЩЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
122ЁЂЖрЯюбЁдёЬт аГВЈМѕЫйЦїЬиБ№ЪЪгУгкЙЄвЕЛњЦїШЫЕФЃЈЃЉжсЕФДЋЖЏЁЃ
AЃЎSжс
BЃЎLжс
CЃЎUжс
DЃЎRжс
EЃЎBжс
FЃЎTжс
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
123ЁЂЬюПеЬт ЩшЖЈЙиНкзјБъЯЕЪБЃЌЛњЦїШЫЕФSЁЂLЁЂUЁЂRЁЂBЁЂTИїжсЃЈЃЉдЫЖЏЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
124ЁЂЬюПеЬт 1998ФъЃЌРжИпНЬг§ЭЦГіЕФЭЗФдЗчБЉЁАЃЈЃЉЁБЯЕСаИФБфСЫЪРНчЕФГБСїКЭДЋЭГЕФПЦММНЬг§.
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
125ЁЂЬюПеЬт ЛњЦїШЫПижЦЯЕЭГАДЦфПижЦЗНЪНПЩвдЗжЮЊЃЈЃЉПижЦЗНЪНЁЂЃЈЃЉПижЦЗНЪНКЭЃЈЃЉПижЦЗНЪНЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
126ЁЂУћДЪНтЪЭ ЕчЛњЮоздзЊ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
127ЁЂЬюПеЬт ЛњЦїШЫРКЧђОКШќГЁЕиГЄЮЊЃЈЃЉC.mЁЂПэЮЊЃЈЃЉC.mЁЂИпЮЊЃЈЃЉC.m.
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
128ЁЂЬюПеЬт ШчЙћЯЃЭћЖСШЁв§НХЕФТпМЕчЦНжЕЃЌвЛЖЈвЊЖСШЁЃЈЃЉЃЌЖјВЛЪЧЃЈЃЉЁЃзЂвтЃКPINXЪЧжЛЖСЕФЃЌВЛФмЖдЦфЃЈЃЉЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
129ЁЂХаЖЯЬт 1954ФъУРЙњШЫЧЧжЮ?ЕТЮжЖћжЦдьГіЪРНчЩЯЕквЛЬЈПЩБрГЬЕФЛњЦїШЫЃЌВЂзЂВсСЫзЈРћЁЃетжжЛњаЕЪжФмАДееВЛЭЌЕФГЬађДгЪТВЛЭЌЕФЙЄзїЃЌвђДЫОпгаЭЈгУадКЭСщЛюадЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
130ЁЂЕЅЯюбЁдёЬт ЮЛжУЕШМЖЪЧжИЛњЦїШЫОЙ§ЪОНЬЕФЮЛжУЪБЕФНгНќГЬЖШЃЌЩшЖЈСЫКЯЪЪЕФЮЛжУЕШМЖЪБЃЌПЩЪЙЛњЦїШЫдЫааГігыжмЮЇзДПіКЭЙЄМўЯрЪЪгІЕФЙьМЃЃЌЦфжаЮЛжУЕШЃЈЃЉЁЃ
AЃЎPLжЕдНаЁЃЌдЫааЙьМЃдНОЋзМ
BЃЎPLжЕДѓаЁЃЌгыдЫааЙьМЃЙиЯЕВЛДѓ
CЃЎPLжЕдНДѓЃЌдЫааЙьМЃдНОЋзМ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
131ЁЂЬюПеЬт ЛњЦїШЫГЃгУЧ§ЖЏЗНЪНжївЊЪЧЃЈЃЉЁЂЃЈЃЉКЭЃЈЃЉШ§жжЛљБОРраЭЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
132ЁЂЕЅЯюбЁдёЬт ЁАM10-5g6g-SЁБжаЕФSБэЪОЃЈЃЉЁЃ
A.зѓа§
B.ЙЋВюДјДњКХ
C.ЖЬа§КЯГЄЖШ
D.ГЄа§КЯГЄЖШ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
133ЁЂЕЅЯюбЁдёЬт ДЋИаЦїЕФЪфГіаХКХДяЕНЮШЖЈЪБЃЌЪфГіаХКХБфЛЏгыЪфШыаХКХБфЛЏЕФБШжЕДњБэДЋИаЦїЕФЃЈЃЉВЮЪ§ЁЃ
A.ПЙИЩШХФмСІ
B.ОЋЖШ
C.ЯпадЖШ
D.СщУєЖШ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
134ЁЂХаЖЯЬт ЭМЯёдіЧПЪЧЕїећЭМЯёЕФЩЋЖШЁЂССЖШЁЂБЅКЭЖШЁЂЖдБШЖШКЭЗжБцТЪЃЌЪЙЕУЭМЯёаЇЙћЧхЮњКЭбеЩЋЗжУїЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
135ЁЂЬюПеЬт 70ФъДњФЉЃЌЛњЦїШЫММЪѕВХФмЕУЕНОоДѓЗЂеЙЁЃ80ФъДњЃЌМЦЫуЛњММЪѕКЭДЋИаЦїЕФЗЂеЙЭЦЖЏСЫЛњЦїШЫЕФЗЂеЙЃЌЫќУЧЖМОпгавЛЖЈЕФЃЈЃЉФмСІЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
136ЁЂЬюПеЬт зїЮЊЭЈгУЪ§зжI/OПкЪЙгУЪБЃЌУПИів§НХЖМОпга3ИіМФДцЦїЮЛЃКЃЈЃЉЁЂЃЈЃЉЁЂЃЈЃЉ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
137ЁЂЕЅЯюбЁдёЬт RoB.oC.upЪЧЪВУДвтЫМЃПЃЈЃЉ
A.ЛњЦїШЫзуЧђБэбнШќ
B.ЛњЦїШЫзуЧђЪРНчБ
C.ЛњЦїШЫОКММ
D.ЛњЦїШЫЮшЕИБШШќ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
138ЁЂЬюПеЬт ЕквЛИіLegoMinD.stormsЕФСуЪлАцБОдкЃЈЃЉФъЩЯЪаЃЌЕБЪБНазіRoB.otiC.sInventionSystemЃЈRISЃЉЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
139ЁЂЖрЯюбЁдёЬт ЛњЦїШЫЪЧздЖЏЛЏЪБДњЕФГшЖљЃЌзлКЯСЫЃЈЃЉЕШбЇПЦЕФГЩЙћЖјЕЎЩњЁЃ
A.ЛњаЕбЇ
B.ЮЂЕчзгММЪѕ
C.МЦЫуЛњ
D.здЖЏПижЦММЪѕ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
140ЁЂЕЅЯюбЁдёЬт ЃЈЃЉФъЃЌНнПЫОчзїМвC.A.pekдкЫћЕФЁЖТоШјФЗЭђФмЛњЦїШЫЙЋЫОЁЗОчБОжаЃЌЕквЛДЮгУСЫЛњЦїШЫRoB.otетИіДЪЁЃ
A.1920
B.1959
C.1930
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
141ЁЂЮЪД№Ьт ЛњЦїШЫЕЅЙиНкЫХЗўПижЦжаЃЌЮЛжУЗДРЁдівцКЭЫйЖШЗДРЁдівцЪЧШчКЮШЗЖЈЕФЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
142ЁЂЕЅЯюбЁдёЬт ЯТУцФФМИВПЕчгАЪЧгыЛњЦїШЫгаЙиЕФЁЃЃЈЃЉ
A.ЁЖжеНсепЁЗ
B.ЁЖБфаЮН№ИеЁЗ
C.ЁЖЙІЗђамУЈЁЗ
D.ЁЖаЧЧђДѓеНЁЗ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
143ЁЂЕЅЯюбЁдёЬт ЛњЦїШЫЕФОЋЖШжївЊвРДцгкЛњаЕЮѓВюЁЂПижЦЫуЗЈЮѓВюгыЗжБцТЪЯЕЭГЮѓВюЁЃвЛАуЫЕРДЃЈЃЉЁЃ
AЃЎОјЖдЖЈЮЛОЋЖШИпгкжиИДЖЈЮЛОЋЖШ
BЃЎжиИДЖЈЮЛОЋЖШИпгкОјЖдЖЈЮЛОЋЖШ
CЃЎЛњаЕОЋЖШИпгкПижЦОЋЖШ
DЃЎПижЦОЋЖШИпгкЗжБцТЪОЋЖШ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
144ЁЂЕЅЯюбЁдёЬт ЕБДњЛњЦїШЫДѓОќжазюжївЊЕФЛњЦїШЫЮЊЃЈЃЉЁЃ
A.ЙЄвЕЛњЦїШЫ
B.ОќгУЛњЦїШЫ
C.ЗўЮёЛњЦїШЫ
D.ЬижжЛњЦїШЫ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
145ЁЂЮЪД№Ьт ЛњЦїШЫПЩвдАяжњШЫРрзіКмЖрЪТЧщЃЌР§ШчЗвыЛњЦїШЫФмЙЛЪЕЯждкШЮКЮЪБМфЁЂГЁЫљЃЌЖдШЮКЮШЫКЭШЮКЮЩшБИЕФЖргябдЗўЮёЃЛАВБЃЛњЦїШЫжаЦфНмГіДњБэЮЊХХБЌЛњЦїШЫЁЃФуЛЙжЊЕРЦфЫќЛњЦїШЫвбОФмЙЛЪЕЯжЕФЗўЮёЯюФПТ№ЃПЧыСаОйжСЩйШ§ИіЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
146ЁЂЕЅЯюбЁдёЬт ЮвУЧвбОНјШыСЫаХЯЂЪБДњЃЌЧрЩйФъХѓгбдкбЇЯАИїЗНУцжЊЪЖЕФЭЌЪБЃЌЧЇЭђВЛвЊКіТдЃЈЃЉжЊЪЖЕФЛ§РлЃЌЗёдђЕБФуЮЊЪЕЯжФГжжЩшЯыЖјПргкИУЗНУцжЊЪЖЕФЦЖЗІЪБЃЌОЭЛсКѓЛкЦНШеЕФДжаФСЫЁЃ
A.ЮФбЇ
B.ЛњаЕ
C.ЩњЮя
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
147ЁЂЕЅЯюбЁдёЬт ЛњЦїШЫФмСІЕФЦРМлБъзМВЛАќРЈЃКЃЈЃЉ
A.жЧФм
B.ЛњФм
C.ЖЏФм
D.ЮяРэФм
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
148ЁЂЬюПеЬт БеЛЗПижЦЯЕЭГЃЈC.loseD.-loopC.ontrolsystemЃЉЕФЬиЕуЪЧЃЈЃЉ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
149ЁЂЕЅЯюбЁдёЬт ВйзїЛњЪжГжЗлБЪдкКкАхЩЯаДзжЃЌдкЃЈЃЉЗНЯђжЛгаСІЕФдМЪјЖјЮоЫйЖШдМЪјЃП
AЃЎXжс
BЃЎYжс
CЃЎZжс
DЃЎRжс
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
150ЁЂЕЅЯюбЁдёЬт ЛњЦїШЫЙьМЃПижЦЙ§ГЬашвЊЭЈЙ§ЧѓНтЃЈЃЉЛёЕУИїИіЙиНкНЧЕФЮЛжУПижЦЯЕЭГЕФЩшЖЈжЕЁЃ
A.дЫЖЏбЇе§ЮЪЬт
B.дЫЖЏбЇФцЮЪЬт
C.ЖЏСІбЇе§ЮЪЬт
D.ЖЏСІбЇФцЮЪЬт
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
151ЁЂХаЖЯЬт гаЕФЛњЦїШЫгаблОІЛсПДЃЌППЕФЪЧЪгОѕДЋИаЦїЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
152ЁЂЬюПеЬт ИЩЩцЧјаХКХЩшжУгаСНжжЃЌЗжБ№ЪЧЃЈЃЉКЭЃЈЃЉЃЌЛљгкЩшБИАВШЋЗНУцПМТЧЃЌЯжГЁЪЙгУЕФИЩЩцЧјОјДѓЖрЪ§ЖМЪЧОјЖдгХЯШИЩЩцЧјЃЌВЂОЁПЩФмЕФЭЈЙ§зївЕЪБађЩЯДэПЊЕФЗНЗЈРДЪЕЯжНкХФзюгХЛЏЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
153ЁЂЖрЯюбЁдёЬт ЛњЦїШЫПижЦЯЕЭГдкЮяРэЩЯЗжЮЊСНМЖЃЌЕЋдкТпМЩЯвЛАуЗжЮЊШчЯТШ§МЖЃКЃЈЃЉЁЃ
AЃЎPIDПижЦЦї
BЃЎЮЛжУПижЦЦї
CЃЎзївЕПижЦЦї
DЃЎдЫЖЏПижЦЦї
EЃЎЧ§ЖЏПижЦЦї
FЃЎПЩБрГЬПижЦЦї
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
154ЁЂУћДЪНтЪЭ ЛњЦїШЫдЫЖЏбЇ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
155ЁЂХаЖЯЬт дЫЖЏПижЦЕФЕчзгГнТжФЃЪНЪЧвЛжжжїЖЏжсгыДгЖЏжсБЃГжвЛжжСщЛюДЋЖЏБШЕФЫцЖЏЯЕЭГЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
156ЁЂЕЅЯюбЁдёЬт CCDЃЈChargeCoupledDeviceЃЉЩуЯёЭЗЪфГіаХКХЮЊЃЈЃЉжЁ/УыЁЃ
AЃЎ20
BЃЎ25
CЃЎ30
DЃЎ50
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
157ЁЂУћДЪНтЪЭ *
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
158ЁЂУћДЪНтЪЭ ЛњЦїШЫЙЄзїдиКЩ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
159ЁЂЕЅЯюбЁдёЬт ЖЏСІбЇжївЊЪЧбаОПЛњЦїШЫЕФЃЈЃЉЁЃ
A.ЖЏСІдДЪЧЪВУД
B.дЫЖЏКЭЪБМфЕФЙиЯЕ
C.ЖЏСІЕФДЋЕнгызЊЛЛ
D.ЖЏСІЕФгІгУ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
160ЁЂЬюПеЬт ЕБЧАгыаХЯЂММЪѕЕФНЛЛЅКЭШкКЯгжВњЩњСЫЁАЃЈЃЉЁБЁЂЁАЭјТчЛњЦїШЫЁБЕФУћГЦЃЌетвВЫЕУїСЫЛњЦїШЫЫљОпгаЕФДДаТЛюСІЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
161ЁЂУћДЪНтЪЭ жБСїЫХЗўЕчЛњЕФЕїЫйОЋЖШ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
162ЁЂЮЪД№Ьт 1886ФъЗЈЙњзїМвРћЖћбЧЕБдкЫћЕФаЁЫЕЁЖЮДРДЯФЭоЁЗжаНЋЭтБэЯёШЫЕФЛњЦїЦ№УћЮЊЁААВЕТТоЖЁЁБЃЈA.nD.roiD.ЃЉЃЌЫќгЩ4ВПЗжзщГЩЃЌЧыЮЪЫќгаФФЫФВПЗжЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
163ЁЂЬюПеЬт ДЋИаЦїАДВтЪддРэКЭБЛМьВтЕФЃЈЃЉПЩвдЗжЮЊаэЖржжЃЌЛњаЕдЫЖЏСПжївЊгаЮЛвЦЁЂЫйЖШЁЂМгЫйЖШЁЂСІЁЂНЧЖШЁЂНЧЫйЖШЁЂНЧМгЫйЖШЁЂОрРыЕШЮяРэСПЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
164ЁЂЬюПеЬт РжИпЛњЦїШЫЬзМўЕФКЫаФЪЧвЛИіГЦЮЊЃЈЃЉЕФПЩГЬађЛЏЛ§ФОЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
165ЁЂЬюПеЬт ЫфШЛA.VRЕЅЦЌЛњжЛЪЧвЛПщаОЦЌЃЌЕЋЁАТщШИЫфаЁЮхдрОхШЋЁБЃЌзїЮЊМЦЫуЛњгІИУОпгаЕФЛљБОВПМўдкЕЅЦЌЛњжаЛљБОЖМАќРЈЃЌвђДЫЫќвбОЪЧвЛИіМђЕЅЕФЮЊЃЈЃЉСЫЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
166ЁЂЬюПеЬт гУЙиНкВхВЙЪОНЬЛњЦїШЫжсЪБЃЌвЦЖЏУќСюЮЊЃЈЃЉЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
167ЁЂЕЅЯюбЁдёЬт ЛњЦїШЫЕФПижЦаХКХгЩМЦЫуЛњЗЂГіЕФЪ§зжаХКХЃЌБиаыЭЈЙ§D./A.ЃЈЪ§зж/ФЃФтЃЉзЊЛЛЦїЃЌзЊЛЛГЩЃЈЃЉаХКХЃЌВХФмШУжДаазАжУНгЪеЁЃ
A.Ъ§зж
B.ФЃФт
C.“0”Лђ“1”
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
168ЁЂЮЪД№Ьт ЪРНчЗЖЮЇФкБШНЯгагАЯьЕФЛњЦїШЫШќЪТ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
169ЁЂЬюПеЬт ЛњЦїШЫЯЕЭГгЩЃЈЃЉЁЂЃЈЃЉЁЂЃЈЃЉЁЂЃЈЃЉВПЗжзщГЩЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
170ЁЂЬюПеЬт ЛњЦїШЫЕФЮЛжУОЋЖШPLЪЧжИЛњЦїШЫОЙ§ЪОНЬЕФЮЛжУЪБЕФНгНќГЬЖШЃЌПЩвдЗжЮЊ9ИіЕШМЖЃЌЗжБ№ЪЧЃЈЃЉЃЌЃЈЃЉЃЌЃЈЃЉЃЌЃЈЃЉЃЌЃЈЃЉЃЌЃЈЃЉЃЌЃЈЃЉЃЌЃЈЃЉЃЌЃЈЃЉЁЃТэздДяБъзМжаЃЌPL=1жИжЛвЊЛњЦїШЫTCPЕуОЙ§вдЪОНЬЕуЮЊдВаФЁЂвдЃЈЃЉЮЊАыОЖЕФдВФкЕФШЮвЛЕуМДЪгЮЊДяЕНЃЛPL=2жИжЛвЊЛњЦїШЫTCPЕуОЙ§вдЪОНЬЕуЮЊдВаФЁЂвдЃЈЃЉЮЊАыОЖЕФдВФкЕФШЮвЛЕуМДЪгЮЊДяЃЛPL=3жИжЛвЊЛњЦїШЫTCPЕуОЙ§вдЪОНЬЕуЮЊдВаФЁЂвдЃЈЃЉЮЊАыОЖЕФдВФкЕФШЮвЛЕуМДЪгЮЊДяЕНЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
171ЁЂЬюПеЬт ЃЈЃЉПЩвдШУФњЕФЛњЦїШЫЃЌвдЧјЗжЧсЃЌЦЄЗєїюКкЃЌвдМАШЗЖЈЙтееЧПЖШдквЛИіЗПМфФкЃЌЛђЙтееЧПЖШВЛЭЌЕФбеЩЋЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
172ЁЂЬюПеЬт ЛњЦїШЫЕФзјБъЯЕЕФжжРрЮЊЃКЃЈЃЉзјБъЯЕЁЂЃЈЃЉзјБъЯЕЁЂЃЈЃЉзјБъЯЕЁЂЃЈЃЉзјБъЯЕЁЂЃЈЃЉзјБъЯЕЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
173ЁЂЬюПеЬт ЛњЦїШЫЙьМЃжЇГжЫФжжВхВЙЗНЪНЃЌЗжБ№ЪЧЃЈЃЉВхВЙЃЌЃЈЃЉВхВЙЃЌЃЈЃЉВхВЙЃЌЃЈЃЉВхВЙЃЌВхВЙУќСюЗжБ№ЪЧЃЈЃЉЃЌЃЈЃЉЃЌЃЈЃЉЃЌЃЈЃЉЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
174ЁЂЬюПеЬт ЛњЦїШЫЪОНЬЪЧжИЃКЃЈЃЉЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
175ЁЂЮЪД№Ьт ЛњЦїШЫЕФЖЈвхЪЧЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
176ЁЂЮЪД№Ьт ЛњЦїШЫВЮЪ§зјБъЯЕгаФФаЉЃПИїВЮЪ§зјБъЯЕгаКЮзїгУЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
177ЁЂУћДЪНтЪЭ ащЙІдРэ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
178ЁЂЕЅЯюбЁдёЬт ФЃФтаХКХЮоЗЈжБНгЪфШыМЦЫуЛњЁЃМЦЫуЛњФкВПФмЙЛДІРэЕФаХКХЪЧЪ§зжаХКХЃЌРДздДЋИаЦїЕФФЃФтаХКХБиаыОЙ§A./D.ЃЈФЃФт/Ъ§зжЃЉзЊЛЛЦїзЊЛЛГЩЃЈЃЉаХКХВХФмЪфШыМЦЫуЛњЁЃ
A.ФЃЪ§
B.ФЃФт
C.Ъ§зж
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
179ЁЂЕЅЯюбЁдёЬт ЪжВПЕФЮЛзЫЪЧгЩЃЈЃЉЙЙГЩЕФЁЃ
A.ЮЛжУгыЫйЖШ
B.зЫЬЌгыЮЛжУ
C.ЮЛжУгыдЫаазДЬЌ
D.зЫЬЌгыЫйЖШ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
180ЁЂЬюПеЬт L298ЪЧSGSЙЋЫОЕФВњЦЗЃЌБШНЯГЃМћЕФЪЧ15НХMultiwA.ttЗтзАЕФL298NЃЌФкВПЭЌбљАќКЌЃЈЃЉЭЈЕРТпМЧ§ЖЏЕчТЗЁЃПЩвдЗНБуЕФЧ§ЖЏЃЈЃЉИіжБСїЕчЛњЃЌЛђЃЈЃЉ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
181ЁЂЕЅЯюбЁдёЬт ЮвЙњзюдчЕФЛњЦїШЫЪЧдкЪВУДЪБКђЃПЃЈЃЉ
A.ЬЦГЏ
B.ЧхГЏКѓЦк
C.НтЗХКѓ
D.ЮїжмЪБЦк
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
182ЁЂЬюПеЬт АДМИКЮНсЙЙЗжЛЎЗжЛњЦїШЫЗжЮЊЃКЃЈЃЉЁЂЃЈЃЉЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
183ЁЂЕЅЯюбЁдёЬт ЪжВПЕФЮЛзЫЪЧгЩФФСНВПЗжБфСПЙЙГЩЕФЃП
A.ЮЛжУгыЫйЖШ
B.зЫЬЌгыЮЛжУ
C.ЮЛжУгыдЫаазДЬЌ
D.зЫЬЌгыЫйЖШ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
184ЁЂЮЪД№Ьт ЗТШЫЛњЦїШЫОпгаШЫРрЕФЭтЙлЃЌПЩвдЪЪгІШЫРрЕФЩњЛюКЭЙЄзїЛЗОГЃЌДњЬцШЫРрЭъГЩИїжжзївЕЃЌВЂПЩвддкКмЖрЗНУцРЉеЙШЫРрЕФФмСІЃЌдкЗўЮёЃЌвНСЦЃЌНЬг§ЃЌгщРжЕШЖрИіСьгђЕУЕНЙуЗКгІгУЁЃЪдОйР§ЫЕУїЗТецЛњЦїШЫдквНСЦЩЯЕФзїгУЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
185ЁЂХаЖЯЬт ЪжБлНтгаНтЕФБивЊЬѕМўЪЧДЎСЊЙиНкСДжаЕФздгЩЖШЪ§ЕШгкЛђаЁгк6ЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
186ЁЂЮЪД№Ьт ФЃФтдйЯж
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
187ЁЂЬюПеЬт ЛњЦїШЫЕФдЫЖЏбЇЪЧбаОПЛњЦїШЫФЉЖЫжДааЦїЃЈЃЉКЭЃЈЃЉгыЙиНкПеМфжЎМфЕФЙиЯЕЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
188ЁЂЬюПеЬт ЧрЩйФъЛњЦїШЫЪРНчБЃЈRoB.oC.upjuniorЃЉЕФБШШќЯюФПЃЌЙцЖЈЫљгаЛњЦїШЫБиаыЪЧЃЈЃЉЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
189ЁЂУћДЪНтЪЭ CALL
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
190ЁЂЕЅЯюбЁдёЬт ЖдЗжРыЯИАћЕФБЃДцЫЕЗЈДэЮѓЕФЪЧЃЈЃЉ
A.гУЪЪСПЕФ10ЃЅЁЋ20ЃЅаЁХЃбЊЧхЕФHanks’ЕШХрбјвКжиаќ
B.ХрбјвКвЊЧѓЕШЩјЃЌОпгаpHЛКГхзїгУ
C.ЖЬЦкБЃДцжаЃЌЗХ4ЁцБЃДц
D.ЖЬЦкБЃДцжаЃЌбИЫйИФБфЯИАћЫљДІЕФЮТЖШЃЌвдУтдьГЩЮТЖШанПЫ
E.ГЄЦкБЃДцжаЃЌЗХдквКЕЊжаЃЌЃ196Ёц
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
191ЁЂЮЪД№Ьт ЪдТлЪіЛњЦїШЫОВСІбЇЁЂЖЏСІбЇЁЂдЫЖЏбЇЕФЙиЯЕЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
192ЁЂХаЖЯЬт ФкВПаХЯЂДЋИаЦїЪЧгУгкМьВтЛњЦїШЫИїВПЗжЕФФкВПзДПіЕФЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
193ЁЂХаЖЯЬт ЛњаЕЕФШсадЛЏКЭжЧФмЛЏжИЕФЪЧвЊЪЙЛњаЕФмЙЛЯёЖЏЮяФЧбљСщЛюЖЏзїЃЌвВФмЯёШЫРрФЧбљЛсЫМПМХаЖЯЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
194ЁЂХаЖЯЬт МгЬйвЛРЩГЄЦкжТСІгкбаОПЗТШЫЛњЦїШЫЃЌБЛгўЮЊЗТШЫЛњЦїШЫжЎИИЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
195ЁЂХаЖЯЬт ЛњЕчвЛЬхЛЏОЭЪЧ"РћгУЕчзгЁЂаХЯЂЁЂЃЈАќРЈДЋИаЦїЁЂПижЦЁЂМЦЫуЛњЕШЃЉММЪѕЪЙЛњаЕШсадЛЏКЭжЧФмЛЏ"ЕФММЪѕЃЌГфЗжЗЂЛгИїздЕФГЄДІЖјЮоашУжВЙИїЯюММЪѕЕФВЛзуЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
196ЁЂЕЅЯюбЁдёЬт гюжцЦ№дДгкЃЈЃЉФъЧАЮТЖШКЭУмЖШНЯИпЕФЁАдЪМЛ№ЧђЁБЕФвЛДЮДѓБЌеЈЁЃ
A.160вк
B.200вк
C.60вк
D.130вк
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
197ЁЂЮЪД№Ьт ЛњЦїШЫЗЂеЙЕФШ§ИіНзЖЮ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
198ЁЂУћДЪНтЪЭ TIMER
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
199ЁЂХаЖЯЬт ВЛБиЪЙЛњЦїШЫЖЏзїЃЌЭЈЙ§Ъ§жЕЁЂгябдЕШЖдЛњЦїШЫНјааЪОНЬЃЌЛњЦїШЫИљОнЪОНЬКѓЕФаХЯЂНјаазївЕЪЧЪ§ПиаЭЛњЦїШЫЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
200ЁЂХаЖЯЬт РћгУДЋИаЦїЛёШЁЕФаХЯЂПижЦЛњЦїШЫЕФЖЏзїЕФЪЧЪЪгІПижЦаЭЛњЦїШЫЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
201ЁЂЮЪД№Ьт MOTOMANЛњЦїШЫЪОНЬХЬФЃЪНа§ХЅЩЯгаШ§жжФЃЪНЃЌЗжБ№ЪЧФФШ§жжЃЌВЂаДГіШ§жжФЃЪНИїздЕФЬиЕуЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
202ЁЂХаЖЯЬт МЄЙтВтОрвЧПЩвдНјааЩЂзАЮяСЯжиСПЕФМьВтЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
203ЁЂЕЅЯюбЁдёЬт ЛњЦїШЫОЭЪЧНЋЪЕЯжШЫРрЕФбќЁЂМчЁЂДѓБлЁЂаЁБлЁЂЪжЭѓЁЂЪжвдМАЪжжИЕФдЫЖЏЕФЛњаЕзщКЯЦ№РДЃЌЙЙдьГЩФмЙЛДЋЕнЯёШЫРрвЛбљдЫЖЏЕФЛњаЕЁЃЛњаЕММЪѕОЭЪЧЪЕЯжетжжЃЈЃЉЕФММЪѕЁЃ
A.дЫЖЏДЋЕн
B.дЫЖЏФмСП
C.дЫЖЏПьТ§
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
204ЁЂЕЅЯюбЁдёЬт Лњ ЦїШЫШ§ддђЪЧгЩЫЬсГіЕФЁЃЃЈЃЉ
A.ЩеўКы
B.дМЩЊЗђ•гЂИёВЎИё
C.ЭаФЊЮЌЦц
D.АЂЮїФЊЗђ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
205ЁЂЕЅЯюбЁдёЬт 1999ФъШеБОЫїФсЙЋЫОЭЦГіШЎаЭЛњЦїШЫНаЪВУДЁЃЃЈЃЉ
A.SIB.O
B.A.IB.O
C.A.SIB.O
D.QRIO
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
206ЁЂЕЅЯюбЁдёЬт ЛњЦїШЫШ§ддђЪЧгЩЃЈЃЉЬсГіЕФЁЃ
A.ЩеўКы
B.дМЩЊЗђ·гЂИёВЎИё
C.ЭаФЊЮЌЦц
D.АЂЮїФЊЗђ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
207ЁЂЮЪД№Ьт ЪдТлЪіОЋЖШЁЂжиИДОЋЖШгыЗжБцТЪжЎМфЕФЙиЯЕЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
208ЁЂЕЅЯюбЁдёЬт ЖдгквЦЖЏЃЈЦНЖЏЃЉЙиНкЖјбдЃЌЙиНкБфСПЪЧD-HВЮЪ§жаЕФЃЈЃЉЁЃ
AЃЎЙиНкНЧ
BЃЎИЫМўГЄЖШ
CЃЎКсОр
DЃЎХЄзЊНЧ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
209ЁЂЬюПеЬт ЪжЖЏЫйЖШЗжЮЊЃКЃЈЃЉЁЂЃЈЃЉЁЂЃЈЃЉЁЂЃЈЃЉЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
210ЁЂЮЪД№Ьт ЬижжЛњЦїШЫЪЧГ§ЙЄвЕЛњЦїШЫжЎЭтЕФЁЂгУгкЗЧжЦдьвЕВЂЗўЮёгкШЫРрЕФИїжжЯШНјЛњЦїШЫЃЌЧыжСЩйСаОйЫФИіетбљЕФЛњЦїШЫУћГЦЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
211ЁЂЕЅЯюбЁдёЬт ЪЙгУЛњаЕЕФФПЕФЪЧЪЁСІЁЂЛђМгПьЫйЖШЃЈЪЁЪБЃЉЁЂЛђВйзїЗНБуЃЈИФБфСІЕФЗНЯђЃЉЃЌЪЙгУЛњаЕОјЖдВЛФмЪЁЙІЃЌвВВЛЛсВњЩњЙІЃЌЖјжЛФмЃЈЃЉЙІКЭФмЁЃ
A.ДЋЕнЛђзЊЛЛ
B.діМг
C.МѕЩй
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
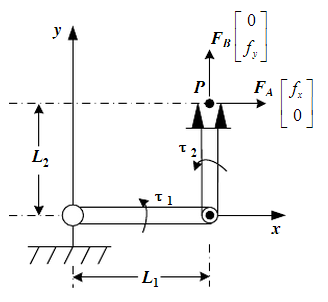
212ЁЂЮЪД№Ьт ШчЭМЫљЪОСНздгЩЖШЛњаЕЪждкШчЭМЮЛжУЪБЃЈІШ1=0ЃЌІШ2=Іа/2ЃЉЃЌЩњГЩЪжзІСІFA=[fx0]TЛђFB=[0fy]TЁЃЧѓЖдгІЕФЧ§ЖЏСІІгAКЭІгBЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
213ЁЂЕЅЯюбЁдёЬт ЫљЮНЮозЫЬЌВхВЙЃЌМДБЃГжЕквЛИіЪОНЬЕуЪБЕФзЫЬЌЃЌдкДѓЖрЪ§ЧщПіЯТЪЧЛњЦїШЫбиЃЈЃЉдЫЖЏЪБГіЯжЁЃ
AЃЎЦНУцдВЛЁ
BЃЎжБЯп
CЃЎЦНУцЧњЯп
DЃЎПеМфЧњЯп
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
214ЁЂЕЅЯюбЁдёЬт дЫЖЏе§ЮЪЬтЪЧЪЕЯжШчЯТБфЛЛЃЈЃЉЁЃ
AЃЎДгЙиНкПеМфЕНВйзїПеМфЕФБфЛЛ
BЃЎДгВйзїПеМфЕНЕЯПЈЖћПеМфЕФБфЛЛ
CЃЎДгЕЯПЈЖћПеМфЕНЙиНкПеМфЕФБфЛЛ
DЃЎДгВйзїПеМфЕНЙиНкПеМфЕФБфЛЛ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
215ЁЂЕЅЯюбЁдёЬт бЙЕчЪНДЋИаЦїЃЌМДгІгУАыЕМЬхбЙЕчаЇгІПЩвдВтСПЃЈЃЉЁЃ
AЃЎЕчбЙ
BЃЎССЖШ
CЃЎСІКЭСІОи
DЃЎОрРы
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
216ЁЂЮЪД№Ьт ЧыМђЪіФЃК§ПижЦЦїЕФзщГЩМАИїзщГЩВПЗжЕФгУЭОЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
217ЁЂЮЪД№Ьт ЛњЦїШЫзуЧђЩцМАЕФжївЊбаОПСьгђгаФФаЉЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
218ЁЂХаЖЯЬт ЛњЦїШЫЕФШЋВППижЦПЩгЩвЛЬЈЮЂаЭМЦЫуЛњЭъГЩЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
219ЁЂЮЪД№Ьт ЯћГ§ДЋЖЏМфЯЖЕФжївЊЭООЖгаФФаЉЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
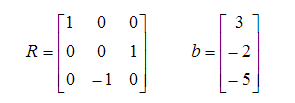
220ЁЂЮЪД№Ьт вбжЊRЮЊа§зЊОиеѓЃЌbЮЊЦНвЦЯђСПЃЌЪдаДГіЯргІЕФЦыДЮОиеѓЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
221ЁЂЮЪД№Ьт РИёРЪШедЫЖЏЗНГЬЪНЕФвЛАуБэЪОаЮЪНгыИїБфСПКЌвхЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
222ЁЂЬюПеЬт РжИпЕФДДЪМШЫЪЧЃЈЃЉ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
223ЁЂУћДЪНтЪЭ ЭМЯёШёЛЏ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
224ЁЂЕЅЯюбЁдёЬт ЗДРЁПижЦдкПижЦЙ§ГЬжаВЛЖЯЕїећБЛПижЦСПШчЮЛвЦЁЂЫйЖШЁЂЕШСЌајБфЛЏЕФЮяРэСПЃЌЪЙжЎДяЕНЃЈЃЉЕФПижЦЗНЪНЁЃ
A.ЗДРЁПижЦ
B.дЄЦкЩшЖЈжЕ
C.ПЊЛЗ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
225ЁЂЮЪД№Ьт ШчЭМЫљЪОЕФСНздгЩЖШЛњаЕЪжЃЌЪжВПбиЙЬЖЈзјБъЯЕдкЪжЩЯX0жсе§Яђвд1.0m/sЕФЫйЖШвЦЖЏЃЌИЫГЄl1=l2=0.5mЁЃЩшдкФГЪБПЬІШ1=30ЁуЃЌІШ2=-60ЁуЃЌЧѓИУЪБПЬЕФЙиНкЫйЖШЁЃвбжЊСНздгЩЖШЛњаЕЪжЫйЖШбХПЩБШОиеѓЮЊ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
226ЁЂЮЪД№Ьт АДЛњЦїШЫбаОПЁЂПЊЗЂКЭЪЕгУЛЏЕФНјГЬЗжРрЃЌЛњЦїШЫЛЎЗжЮЊШ§ДњЃЌМђЪіетШ§ДњЛњЦїШЫЕФжївЊЬиадЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
227ЁЂЖрЯюбЁдёЬт УРЙњЗЂЭљЛ№аЧЕФЛњЦїШЫЪЧЃЈЃЉКХЁЃ
AЃЎгТЦј
BЃЎЛњгі
CЃЎаЁСдЭУШЎ
DЃЎЬєеНеп
EЃЎИчТзБШбЧ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
228ЁЂЮЪД№Ьт ЙњМЪЛњЦїШЫАТСжЦЅПЫОКШќЕФФПЕФЪЧЪВУДЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
229ЁЂХаЖЯЬт аГВЈМѕЫйЛњЕФУћГЦРДдДЪЧвђЮЊИеТжГнШІЩЯШЮвЛЕуЕФОЖЯђЮЛвЦГЪНќЫЦгкгрЯвВЈаЮЕФБфЛЏЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
230ЁЂЕЅЯюбЁдёЬт 70ФъДњФЉЃЌЛњЦїШЫММЪѕВХЕУЕНОоДѓЗЂеЙЁЃ80ФъДњЃЌМЦЫуЛњММЪѕКЭДЋИаЦїЕФЗЂеЙЭЦЖЏСЫЛњЦїШЫЕФЗЂеЙЃЌЫќУЧЖМОпгавЛЖЈЕФЃЈЃЉФмСІЃЌ90ФъДњЃЌаЁаЭЧсаЭЛњЦїШЫПЊЪМГіЯжЃЌетРрЛњЦїШЫФмдкЬиЪтЕФЛЗОГжаЭъГЩИјЖЈЕФШЮЮёЁЃ
A.вЛАу
B.жиИДЙЄзї
C.ЪЖБ№ХаЖЯ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
231ЁЂЬюПеЬт ЛњЦїШЫЛёШЁЭтНчаХЯЂЃКЯрЕБгкШЫЕФблЁЂЖњЁЂЩрЭЗКЭЦЄЗєЃЌПЩГЦжЎЮЊЃЈЃЉЦїЙйЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
232ЁЂУћДЪНтЪЭ PIDПижЦ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
233ЁЂЮЪД№Ьт дкЪ§ОнПтгыЭјТчЕФжЇГжЯТЃЌзщГЩМЦЫуЛњМЏГЩжЦдьЯЕЭГАќРЈФФаЉЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
234ЁЂЬюПеЬт ЛњЦїШЫОпгаШ§ДѓЬиеїЃКЃЈЃЉЁЂЃЈЃЉЁЂЃЈЃЉЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
235ЁЂХаЖЯЬт ИёСжЃЈИёРзЃЉТыБЛДѓСПгУдкЯрЖдЙтжсБрТыЦїжаЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
236ЁЂЕЅЯюбЁдёЬт ЙЄвЕЛњЦїШЫдЫЖЏздгЩЖШЪ§ЃЌвЛАуЃЈЃЉ
AЃЎаЁгк2Иі
BЃЎаЁгк3Иі
CЃЎаЁгк6Иі
DЃЎДѓгк6Иі
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
237ЁЂХаЖЯЬт ЙХДњРЭЖЏШЫУёДДдьГіжИФЯГЕЁЂМЦРяЙФГЕЁЂЛывЧЁЂМђвЧЁЂЫЎдЫвЧЯѓЬЈЁЂЕиЖЏвЧЁЂЭКјЕЮТЉЕШЪЧМгЙЄЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
238ЁЂЮЪД№Ьт ЛњЦїШЫЪжЭѓгаМИжжЃПЪдЪіУПжжЪжЭѓНсЙЙЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
239ЁЂЮЪД№Ьт дкЙЄвЕЛњЦїШЫЩшМЦжаЖдЪжЭѓЩшМЦжївЊЕФвЊЧѓЪЧЪВУДЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
240ЁЂХаЖЯЬт 1948ФъАЂЮїФЊЗђГіАцЁЖПижЦТлЁЊЁЊЙигкдкЖЏЮяКЭЛњжаПижЦКЭЭЈбЖЕФПЦбЇЁЗЃЌВћЪіСЫЛњЦїжаЕФЭЈаХКЭПижЦЛњФмгыШЫЕФЩёОЁЂИаОѕЛњФмЕФЙВЭЌЙцТЩЃЌТЪЯШЬсГівдМЦЫуЛњЮЊКЫаФЕФздЖЏЛЏЙЄГЇЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
241ЁЂЮЪД№Ьт ЛњЦїШЫбЇжївЊАќКЌФФаЉбаОПФкШнЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
242ЁЂЖрЯюбЁдёЬт дЕуЮЛжУаЃзМЪЧНЋЛњЦїШЫЮЛжУгыОјЖдБрТыЦїЮЛжУНјааЖдееЕФВйзїЁЃдЕуЮЛжУаЃзМЪЧдкГіГЇЧАНјааЕФЃЌЕЋдкЃЈЃЉЧщПіЯТБиаыдйДЮНјаадЕуЮЛжУаЃзМЁЃ
A.ИФБфЛњЦїШЫгыПижЦЙёЃЈNX100ЃЉЕФзщКЯЪБ
B.ИќЛЛЕчЛњЁЂОјЖдБрТыЦїЪБ
C.ДцДЂФкДцБЛЩОГ§ЪБЃЈИќЛЛNCP01ЛљАхЁЂЕчГиКФОЁЪБЕШЃЉ
D.ЛњЦїШЫХізВЙЄМўЃЌдЕуЦЋвЦЪБ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
243ЁЂЕЅЯюбЁдёЬт ЛњЦїШЫдкЦєЖЏвдКѓЃЌВЛашвЊШЫЕФИЩдЄЃЌФмЙЛздЖЏЭъГЩжИЖЈЕФИїЯюШЮЮёЃЌВЂЧвдкећИіЙ§ГЬжаФмЙЛжїЖЏЪЪгІЫљДІЕФЛЗОГЕФБфЛЏЁЃЛњЦїШЫвЛБпЪЪгІИїжжБфЛЏЃЌвЛБпзїГіаТЕФХаЖЯЃЌОіЖЈНјвЛВНЕФЖЏзїЁЃИУЛњЦїШЫОпгаЃЈЃЉадЁЃ
A.здЖЏ
B.ЮожЧФм
C.здЪЪгІ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
244ЁЂЖрЯюбЁдёЬт ЖдЛњЦїШЫНјааЪОНЬЪБЃЌЮЊСЫЗРжЙЛњЦїШЫЕФвьГЃЖЏзїИјВйзїШЫдБдьГЩЮЃЯеЃЌзївЕЧАБиаыНјааЕФЯюФПМьВщгаЃЈЃЉЕШЁЃ
AЃЎЛњЦїШЫЭтВПЕчРТЯпЭтЦЄгаЮоЦЦЫ№
BЃЎЛњЦїШЫгаЮоЖЏзївьГЃ
CЃЎЛњЦїШЫжЦЖЏзАжУЪЧЗёгааЇ
DЃЎЛњЦїШЫНєМБЭЃжЙзАжУЪЧЗёгааЇ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
245ЁЂЬюПеЬт ШчЙћЛњЦїШЫЯрСкСНЙиНкжсЯпЯрНЛЃЌдђСЊНгетСНИіЙиНкЕФСЌИЫГЄЖШЮЊЃЈЃЉЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
246ЁЂХаЖЯЬт ЙЋдЊЧА2ЪРМЭЃЌбЧРњЩНДѓЪБДњЕФЙХЯЃРАШЫЗЂУїСЫзюдЪМЕФЛњЦїШЫЉЄЉЄздЖЏЛњЁЃЫќЪЧвдЫЎЁЂПеЦјКЭеєЦћбЙСІЮЊЖЏСІЕФЛсЖЏЕФЕёЯёЃЌЫќПЩвдздМКПЊУХЃЌЛЙПЩвдНшжњеєЦћГЊИшЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
247ЁЂЕЅЯюбЁдёЬт жаЙњдкЛњЦїШЫзуЧђЙњМЪШќГЁЩЯН№ХЦСуЕФЭЛЦЦЪЧдкФФвЛФъЁЃЃЈЃЉ
A.1995
B.1996
C.1998
D.1999
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
248ЁЂЬюПеЬт ЙЄвЕЛњЦїШЫЯЕЭГгЩЫФДѓВПЗжзщГЩЃКЃЈЃЉЁЂЃЈЃЉЁЂЃЈЃЉКЭЃЈЃЉЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
249ЁЂЬюПеЬт 6здгЩЖШЛњЦїШЫгаНтЮіФцНтЕФЬѕМўЪЧЛњЦїШЫВйзїЪжЕФЖРСЂЙиНкБфСПЖргкЃЈЃЉЕФдЫЖЏздгЩЖШЪ§ЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
250ЁЂЬюПеЬт здЖЏЛњЦїШЫЦєЖЏЧјЭЈЙ§ЙЋТЗЧјКЭЃЈЃЉЯрСЌЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
251ЁЂЬюПеЬт ЃЈЃЉБфСПдкЕЅЦЌЛњC.гябджавЛАугУВЛЕН
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
252ЁЂЖрЯюбЁдёЬт ЃвЃжАкЯпеыТжМѕЫйЦїЬиБ№ЪЪгУгкЙЄвЕЛњЦїШЫЕФЃЈЃЉжсЕФДЋЖЏЁЃ
AЃЎSжс
BЃЎLжс
CЃЎUжс
DЃЎRжс
EЃЎBжс
FЃЎTжс
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
253ЁЂЮЪД№Ьт жЧФмжааЭзуЧђЛњЦїШЫЬпЧђЛњЙЙгаФФМИжжаЮЪНЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
254ЁЂЮЪД№Ьт ЛњЦїШЫздгЩЖШЪЧЗёдНЖрдНгаРћЃПМђЕЅЫЕУїдвђЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
255ЁЂУћДЪНтЪЭ NOP
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
256ЁЂУћДЪНтЪЭ JUMP
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
257ЁЂЮЪД№Ьт зїЮЊаТвЛДњЕФДѓбЇЩњЃЌФуЖдЮДРДЛњЦїШЫЕФЗЂеЙЧАОАгаКЮЩшЯыЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
258ЁЂЮЪД№Ьт ЪВУДЪЧздгЩЖШЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
259ЁЂЖрЯюбЁдёЬт дкЫХЗўЕчЛњЕФЫХЗўПижЦЦїжаЃЌЮЊСЫЛёЕУИпадФмЕФПижЦаЇЙћЃЌвЛАуОпга3ИіЗДРЁЛиТЗЃЌЗжБ№ЪЧЃЈЃЉЁЃ
AЃЎЕчбЙЛЗ
BЃЎЕчСїЛЗ
CЃЎЙІТЪЛЗ
DЃЎЫйЖШЛЗ
EЃЎЮЛжУЛЗ
FЃЎМгЫйЖШЛЗ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
260ЁЂУћДЪНтЪЭ бЙЕчдЊМў
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
261ЁЂУћДЪНтЪЭ AUV
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
262ЁЂХаЖЯЬт ЙьМЃВхВЙдЫЫуЪЧАщЫцзХЙьМЃПижЦЙ§ГЬвЛВНВНЭъГЩЕФЃЌЖјВЛЪЧдкЕУЕНЪОНЬЕужЎКѓЃЌвЛДЮЭъГЩЃЌдйЬсНЛИјдйЯжЙ§ГЬЕФЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
263ЁЂЕЅЯюбЁдёЬт ЮвЙњЪзНьЛњЦїШЫзуЧђБШШќЪЧдкФЧРяОйааЕФЁЃЃЈЃЉ
A.ЙўЖћБѕ
B.ББОЉ
C.ЩЯКЃ
D.Йужн
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
264ЁЂУћДЪНтЪЭ жЦЖЏЦїЪЇаЇБЇеЂ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
265ЁЂХаЖЯЬт СІбЇжЎИИАЂЛљУзЕУЫЕЙ§ЃК"МйШчИјЮввЛИіжЇЕуЃЌЮвОЭФмЭЦЖЏЕиЧђ"ЃЌОЭЗЧГЃаЮЯѓЕиУшЪіСЫаБУцЪЁСІдРэЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
266ЁЂЕЅЯюбЁдёЬт гІгУЕчШнЪНДЋИаЦїВтСПЮЂУзМЖЕФОрРыЃЌгІИУВЩгУИФБфЃЈЃЉЕФЗНЪНЁЃ
AЃЎМЋМфЮяжЪНщЕчЯЕЪ§
BЃЎМЋАхУцЛ§
CЃЎМЋАхОрРы
DЃЎЕчбЙ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
267ЁЂЬюПеЬт ПЊЛЗПижЦЯЕЭГЃЈopen-loopC.ontrolsystemЃЉЪЧжИЃЈЃЉЁЃдкетжжПижЦЯЕЭГжаЃЌЃЈЃЉЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
268ЁЂЖрЯюбЁдёЬт ЭЈГЃЙЙГЩЛњЦїШЫЯЕЭГЕФИїжсИљОнЦфЙІФмЗжБ№ГЦзїЃЈЃЉЁЃ
A.ЛњЦїШЫжс
B.Лљзљжс
C.ЙЄзАжс
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
269ЁЂЬюПеЬт жЧФмЙІТЪаОЦЌB.TS7960ЪЧгІгУгкЃЈЃЉЕФДѓЕчСїЃЈЃЉаОЦЌ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
270ЁЂЕЅЯюбЁдёЬт ЖдЛњЦїШЫНјааЪОНЬЪБЃЌФЃЪНа§ХЅДђЕНЪОНЬФЃЪНКѓЃЌдкДЫФЃЪНжаЃЌЭтВПЩшБИЗЂГіЕФЦєЖЏаХКХЃЈЃЉЁЃ
AЃЎЮоаЇ
BЃЎгааЇ
CЃЎбгЪБКѓгааЇ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
271ЁЂХаЖЯЬт ЯжДњЛњЦїШЫЕФбаОПЪМгк20ЪРМЭжаЦкЃЌЦфММЪѕБГОАЪЧМЦЫуЛњКЭздЖЏЛЏЕФЗЂеЙЃЌвдМАдзгФмЕФПЊЗЂРћгУЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
272ЁЂЬюПеЬт ГЃгУЕФНЈСЂЛњЦїШЫЖЏСІбЇЗНГЬЕФЗНЗЈгаЃЈЃЉКЭЃЈЃЉЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
273ЁЂЬюПеЬт ФПЧАГЃгУЕФДЋЖЏМўЕФЖЈЮЛЗНЗЈгаЃКЃЈЃЉЁЂЃЈЃЉКЭЃЈЃЉЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
274ЁЂЕЅЯюбЁдёЬт 6ЮЌСІгыСІОиДЋИаЦїжївЊгУгкЃЈЃЉЁЃ
A.ОЋУмМгЙЄ
B.ОЋУмВтСП
C.ОЋУмМЦЫу
D.ОЋУмзАХф
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
275ЁЂЮЪД№Ьт МђЪіТіГхЛиВЈЪНГЌЩљВЈДЋИаЦїЕФЙЄзїдРэЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
276ЁЂЮЪД№Ьт ГЃМћЕФЛњЦїШЫЭтВПДЋИаЦїгаФФаЉЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
277ЁЂЬюПеЬт ЙЄвЕЛњЦїШЫзюЯджјЕФЬиЕугаЃЈЃЉЁЂЃЈЃЉЁЂЃЈЃЉЁЂЃЈЃЉЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
278ЁЂЕЅЯюбЁдёЬт ZKRT-300ЛњЦїШЫЛизЊЛњЙЙЕФЧ§ЖЏЕчЛњЪЧЃЈЃЉЁЃ
AЁЂВННјЕчЛњ
BЁЂЦеЭЈжБСїЕчЛњ
CЁЂжБСїЫХЗўЕчЛњ
DЁЂНЛСїЫХЗўЕчЛњ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
279ЁЂЮЪД№Ьт ЛњЦїШЫММЪѕВЮЪ§гаФФаЉЃПИїВЮЪ§ЕФвтвхЪЧЪВУДЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
280ЁЂЮЪД№Ьт ЛњЦїШЫВњЩњЕФБГОАЪВУДЃПЮЊЪВУДвЊЗЂеЙЛњЦїШЫЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
281ЁЂЕЅЯюбЁдёЬт ЭЈЙ§ПЊЙиЛђМЬЕчЦїДЅЕуЕФНгЭЈКЭЖЯПЊРДПижЦжДаазАжУЕФЦєЖЏЛђЭЃжЙЃЌДгЖјЖдЯЕЭГвРДЮНјааПижЦЕФЗНЪНЁЃГЦЮЊЃЈЃЉЁЃ
A.ЫГађПижЦ
B.ЗДРЁПижЦ
C.МЦЫуЛњгябд
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
282ЁЂЮЪД№Ьт ЪдЪіЛњЦїШЫЪгОѕЕФНсЙЙМАЙЄзїдРэ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
283ЁЂЮЪД№Ьт ЛњЦїШЫГЃгУЕФЛњЩэКЭБлВПЕФХфжУаЭЪНгаФФаЉЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
284ЁЂЕЅЯюбЁдёЬт жЇГХЛњЕчвЛЬхЛЏЕФЯрЙиММЪѕгаЛњаЕЙЄГЬбЇПЦЁЂМьВтгыПижЦбЇПЦЃЌЖјЕчзгЕчТЗЁЂаХЯЂДІРэЁЂМЦЫуЛњБрГЬЪЧЪєгкЃЈЃЉбЇПЦЁЃ
A.ЛњаЕдРэ
B.ДЋИаЦї
C.ЕчзгаХЯЂ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
285ЁЂЕЅЯюбЁдёЬт дк--rВйзїЛњЖЏСІбЇЗНГЬжаЃЌЦфжївЊзїгУЕФЪЧЃЈЃЉЁЃ
AЃЎИчЪЯЯюКЭжиСІЯю
BЃЎжиСІЯюКЭЯђаФЯю
CЃЎЙпадЯюКЭИчЪЯЯю
DЃЎЙпадЯюКЭжиСІЯю
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
286ЁЂЕЅЯюбЁдёЬт ДЋИаЦїЕФЛљБОзЊЛЛЕчТЗЪЧНЋУєИадЊМўВњЩњЕФвзВтСПаЁаХКХНјааБфЛЛЃЌЪЙДЋИаЦїЕФаХКХЪфГіЗћКЯОпЬхЙЄвЕЯЕЭГЕФвЊЧѓЁЃвЛАуЮЊЃЈЃЉЁЃ
A.4ЁЋ20mAЁЂ–5ЁЋ5V
B.0ЁЋ20mAЁЂ0ЁЋ5V
C.-20mAЁЋ20mAЁЂ–5ЁЋ5V
D.-20mAЁЋ20mAЁЂ0ЁЋ5V
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
287ЁЂЕЅЯюбЁдёЬт ДЋИаЦїдкећИіВтСПЗЖЮЇФкЫљФмБцБ№ЕФБЛВтСПЕФзюаЁБфЛЏСПЃЌЛђепЫљФмБцБ№ЕФВЛЭЌБЛВтСПЕФИіЪ§ЃЌБЛГЦжЎЮЊДЋИаЦїЕФЃЈЃЉЁЃ
AЃЎОЋЖШ
BЃЎжиИДад
CЃЎЗжБцТЪ
DЃЎСщУєЖШ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
288ЁЂЬюПеЬт ЛњЦїШЫЩЯГЃгУЕФПЩвдВтСПзЊЫйЕФДЋИаЦїгаЃЈЃЉКЭЃЈЃЉЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
289ЁЂУћДЪНтЪЭ здгЩЖШ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
290ЁЂЕЅЯюбЁдёЬт вдЯТВЛЪєгкКНЬьЦїММЪѕЕФЪЧЃЈЃЉЁЃ
A.диШЫЗЩДЌ
B.ШЫдьЮРаЧ
C.КНЬьЗЩЛњ
D.Л№М§
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
291ЁЂХаЖЯЬт ЖјЙлВтКЭМЦЪБЛњаЕгаИћЁЂРчЁЂёяГЕЁЂЩШГЕЁЂчвГЕЁЂЗФГЕЁЂЙЁЂхѓЁЂЗЂЪЏЛњЕШЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
292ЁЂЕЅЯюбЁдёЬт FMCЪЧЃЈЃЉЕФМђГЦЁЃ
AЃЎМгЙЄжааФ
BЃЎМЦЫуЛњПижЦЯЕЭГ
CЃЎ 91eXaM.orgгРДХЪНЫХЗўЯЕЭГ
DЃЎШсаджЦдьЕЅдЊ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
293ЁЂХаЖЯЬт ЮїжмЪБЦкЃЌжаЙњЕФФмЙЄЧЩНГйШЪІОЭбажЦГіСЫФмИшЩЦЮшЕФСцШЫЃЌетЪЧжаЙњзюдчМЧдиЕФЛњЦїШЫЁЃ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
294ЁЂЕЅЯюбЁдёЬт ШЫЙЄжЧФмЪЧжИРћгУЃЈЃЉЫљОпгаЕФжЧФмЃЌШЫЙЄжЧФмЕФбаОПСьгђАќРЈЃКШЫРрНтОіЮЪЬтЪБЕФЫМЮЌЙ§ГЬЁЂбЇЯАЙ§ГЬЛђОіВпЙ§ГЬЕФНЈФЃЕШЁЃЛњЦїШЫжЧФмЪЧШЫЙЄжЧФмЕФвЛИібаОПЕФжиЕуЁЃ
A.ЛњЦїШЫжЧФм
B.ЛњЦїШЫЖЏзї
C.МЦЫуЛњЪЕЯжШЫРр
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
295ЁЂЕЅЯюбЁдёЬт ЪОНЬ-дйЯжПижЦЮЊвЛжждкЯпБрГЬЗНЪНЃЌЫќЕФзюДѓЮЪЬтЪЧЃЈЃЉЁЃ
AЃЎВйзїШЫдБРЭЖЏЧПЖШДѓ
BЃЎеМгУЩњВњЪБМф
CЃЎВйзїШЫдБАВШЋЮЪЬт
DЃЎШнвзВњЩњЗЯЦЗ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
296ЁЂЕЅЯюбЁдёЬт ЮЊЪЙЛњЦїШЫНјаае§ШЗЕФжБЯпВхВЙЁЂдВЛЁВхВЙЕШВхВЙЖЏзїЃЌаше§ШЗЕиЪфШыКИЧЙЁЂзЅЪжЁЂКИЧЏЕШЙЄОпЕФГпДчаХЯЂЃЌЖЈвхПижЦЕуЕФЮЛжУЁЃЙЄОпаЃбщЪЧПЩвдМђЕЅКЭе§ШЗЕФНјааГпДчаХЯЂЪфШыЕФЙІФм.НјааЙЄОпаЃбщЃЌашвдПижЦЕуЮЊЛљзМЪОНЬ5ИіВЛЭЌЕФзЫЬЌЃЈTC1жСEЁЃЪЕМљжЄУї5ИіВЛЭЌЕФзЫЬЌЃЈЃЉЁЃ
AЃЎЖЏзїБфЛЏдНДѓЦфЙЄОпПижЦЕудНОЋШЗ
BЃЎЖЏзїБфЛЏдНДѓЦфЙЄОпПижЦЕудНВЛОЋШЗ
CЃЎЖЏзїБфЛЏгыЦфЙЄОпПижЦЕуЮоЙи
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
297ЁЂЕЅЯюбЁдёЬт ZKRT-300ЛњЦїШЫЕФаазпЕчЛњЪЧЃЈЃЉЁЃ
AЁЂВННјЕчЛњ
BЁЂЦеЭЈжБСїЕчЛњ
CЁЂжБСїЫХЗўЕчЛњ
DЁЂНЛСїЫХЗўЕчЛњ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
298ЁЂЕЅЯюбЁдёЬт ЛњЦїШЫОГЃЪЙгУЕФГЬађПЩвдЩшжУЮЊжїГЬађЃЌУПЬЈЛњЦїШЫПЩвдЩшжУЃЈЃЉжїГЬађЁЃ
AЃЎ3Иі
BЃЎ5Иі
CЃЎ1Иі
DЃЎЮоЯожЦ
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
299ЁЂЕЅЯюбЁдёЬт ЕБДњЛњЦїШЫжївЊдДгквдЯТСНИіЗжжЇЃЈЃЉЁЃ
AЃЎМЦЫуЛњгыЪ§ПиЛњДВ
BЃЎвЃВйзїЛњгыМЦЫуЛњ
CЃЎвЃВйзїЛњгыЪ§ПиЛњДВ
DЃЎМЦЫуЛњгыШЫЙЄжЧФм
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
300ЁЂЮЪД№Ьт БфЮЛЛњЖдгкКИНгЛњЦїШЫЕФзїгУЪЧЪВУДЃП
ЕуЛїВщПДД№АИ
БОЬтД№АИЃКЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећДјД№АИНтЮіАцЁЖЁяЛњаЕЙЄГЬЁЗЛђЁЖЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПт
ЬтПтЪдПДНсЪјКѓ
ЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећАцЁЖ
ЁяЛњаЕЙЄГЬЁЗЬтПт
ЪжЛњгУЛЇПЩБЃДцЩЯЗНЖўЮЌТыЕНЪжЛњжаЃЌдкЮЂаХЩЈвЛЩЈжагвЩЯНЧбЁдёЁАДгЯрВсбЁШЁЖўЮЌТыЁБМДПЩЁЃ
ЬтПтЪдПДНсЪјКѓ
ЮЂаХЩЈЯТЗНЖўЮЌТыМДПЩДђАќЯТдиЭъећАцЁЖ
ЛњаЕЙЄГЬЃКЙЄвЕЛњЦїШЫЁЗЬтПтЃЌ
ЗжРИЁЂЗжД№АИНтЮіХХАцЁЂаЁзжЬхЗНБуДђгЁБГМЧЃЁОЙуДѓЛсдБХѓгбЪЕеНМьбщЃЌДЫЗНЗЈПМЪдЭЈЙ§ТЪДѓДѓЬсИпЃЁОјЖдЪЧФњПМЪдЙ§ЙиЕФВЛЖўРћЦїЃЁЪжЛњгУЛЇПЩ
БЃДцЩЯЗНЖўЮЌТыЕНЪжЛњжаЃЌдк
ЮЂаХЩЈвЛЩЈжагвЩЯНЧбЁдёЁАДг
ЯрВсбЁШЁЖўЮЌТыЁБМДПЩЁЃ



